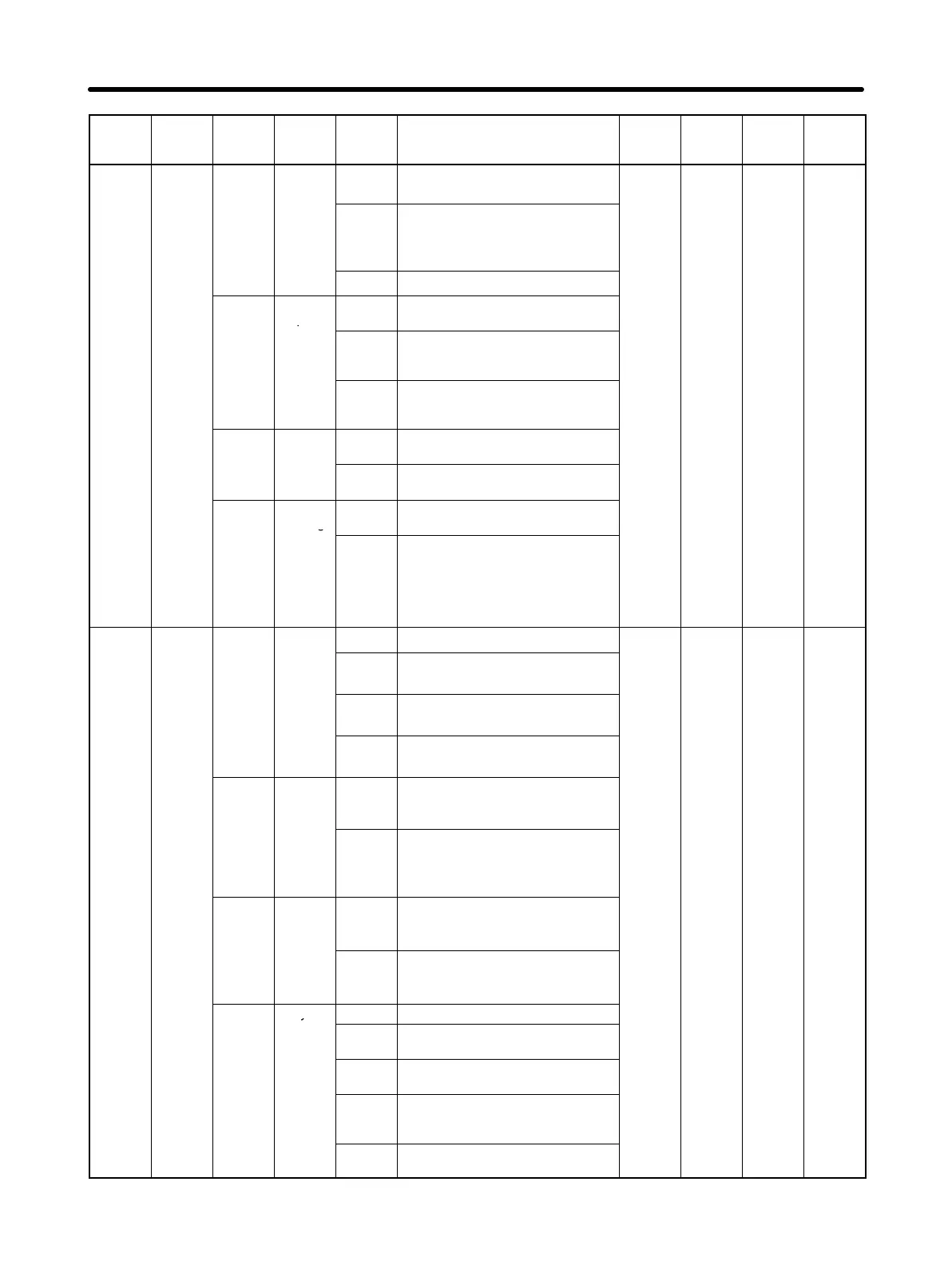
6-16
Param-
eter No.
Restart
power?
Setting
range
UnitDefault
setting
ExplanationSettingNameDigit
No.
Param-
eter
name
Pn001 Function
selec-
-
0 Select
stop if
0 Servomotor stopped by dynamic
brake.
1002 --- --- Yes
on
ap-
plication
switch 1
an
alarm
occurs
when
Servo-
1 Servomotor stopped by dynamic
brake, and then dynamic brake
turned OFF after Servomotor
stopped.
motor is
OFF
2 Servomotor stopped with free run.
1 Select
stop
0 Stop according to Pn001.0 setting
(release Servomotor after stopping)
when
prohib-
ited
1 Stop Servomotor using torque set in
Pn406, and lock Servomotor after
stopping.
input
2 Stop Servomotor using torque set in
Pn406, and release Servomotor
after stopping.
2 Select
AC/DC
0 AC power supply: AC power
supplied from L1, L2, (L3) terminals
power
input
1 DC power supply: DC power from
+1, – terminals
3 Select
warning
0 Alarm code only output from ALO1,
ALO2, ALO3
code
output
1 Alarm code and warning code output
from ALO1, ALO2, ALO3
Pn002 Function
-
0 Torque
-
0 Not used.
0000 --- --- Yes
se
ec-
tion ap-
plication
com-
mand
input
1 Use TREF as analog torque limit
input.
sw
tc
c
ange
(during
position
2 Use TREF as torque feed forward
input.
and
speed
control)
3 Use TREF as analog torque limit
when PCL and NCL are ON.
1 Speed
com-
mand
0 Not used.
input
change
(during
torque
control)
1 Use REF as analog speed limit
input.
2 Opera-
tion
switch
0 Use as absolute encoder.
w
en
using
absolute
encoder
1 Use as incremental encoder.
3 Fully-
0 Fully-closed encoder is not used.
closed
encoder
1 Fully-closed encoder is used without
phase Z.
u
method*
2 Fully-closed encoder is used with
phase Z.
3 Fully-closed encoder is used in Re-
verse Rotation Mode without phase
Z.
4 Fully-closed encoder is used in Re-
verse Rotation Mode with phase Z.
Appendix Chapter 6

 Loading...
Loading...





