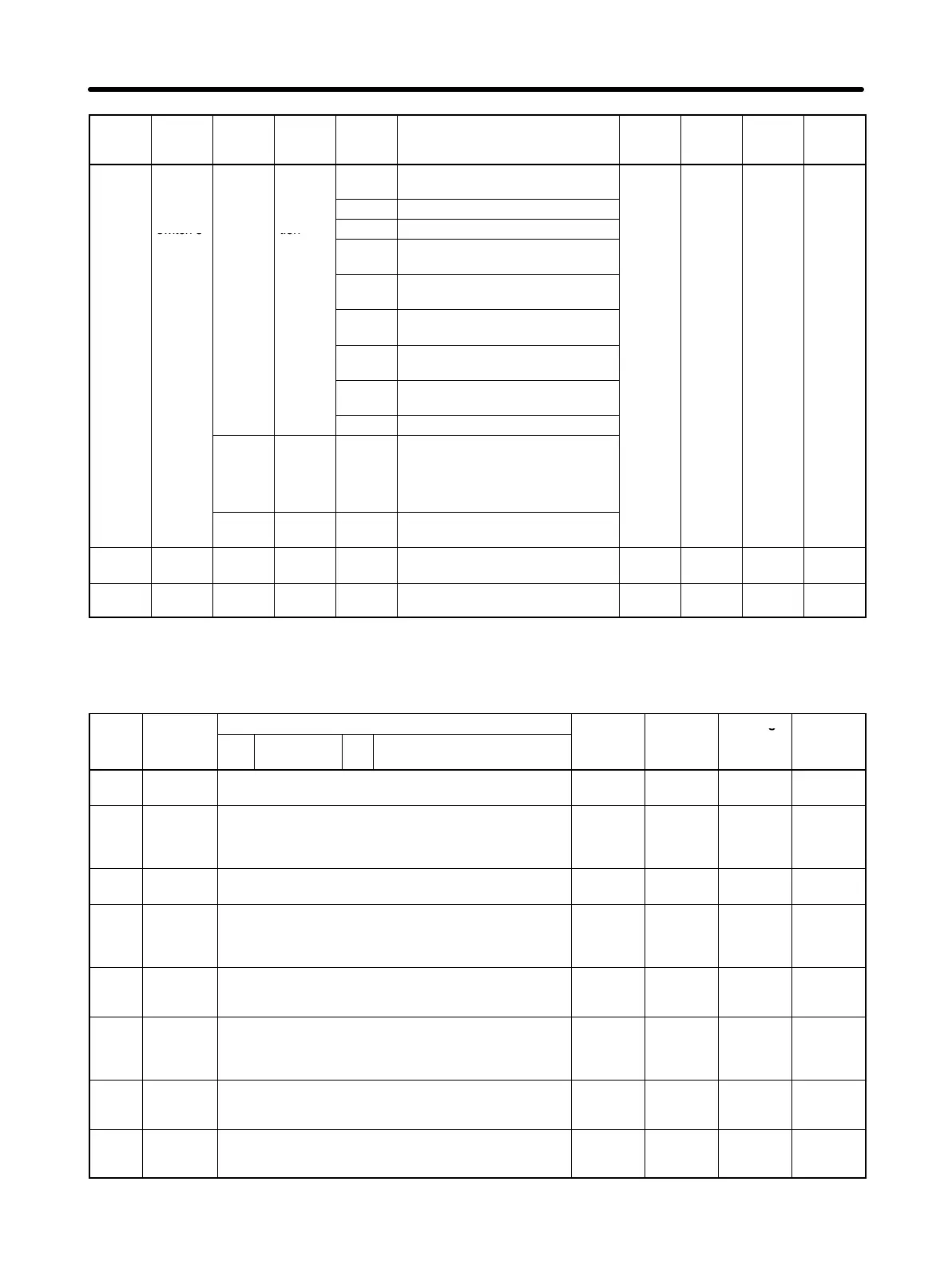
6-17
Param-
eter No.
Restart
power?
Setting
range
UnitDefault
setting
ExplanationSettingNameDigit
No.
Param-
eter
name
Pn003 Function
selec-
0 Analog
monitor
0 Servomotor rotation speed:
1 V/1000 r/min
0002 --- --- ---
tion ap-
1 (AM)
-
1 Speed command: 1 V/1000 r/min
n
switch 3
-
tion
2 Torque command: 1 V/100%
3 Position deviation:
0.05 V/1 command unit
4 Position deviation:
0.05 V/100 command units
5 Command pulse frequency:
1 V/1000 r/min
6 Servomotor rotation speed:
1 V/250 r/min
7 Servomotor rotation speed:
1 V/125 r/min
8 to F Not used.
1 Analog
monitor
2 (NM)
alloca-
tion
0 to F Same as Pn003.0
2 to 3 Not
used.
0 (Do not change setting.)
Pn004 Not
used.
--- --- (Do not change setting.) 0000 --- --- ---
Pn005 Not
used.
--- --- (Do not change setting.) 0000 --- --- ---
H Servo Gain Parameters (From Pn100)
Param- Parameter
Explanation (See note 1.)
Default
Unit Setting Restart
eter
No.
name
Digit
No.
Name Set-
ting
Explanation (See note 2.)
setting
range power?
Pn100 Speed
loop gain
Adjusts speed loop responsiveness. 80 Hz 1 to 2000 ---
Pn101 Speed
loop
integration
constant
Speed loop integral time constant 2000 x 0.01 ms 15 to
51200
---
Pn102 Position
loop gain
Adjusts position loop responsiveness. 40 1/s 1 to 2000 ---
Pn103 Inertia
ratio
Set using the ratio between the machine system inertia and
the Servomotor rotor inertia.
300 % 0 to
20000
(See note
3.)
---
Pn104 Speed
loop gain
2
Adjusts speed loop responsiveness (enabled by gain
switching input).
80 Hz 1 to 2000 ---
Pn105 Speed
loop
integration
constant 2
Speed loop integral time constant (enabled by gain
switching input).
2000 x 0.01 ms 15 to
51200
---
Pn106 Position
loop gain
2
Adjusts position loop responsiveness (enabled by gain
switching input).
40 1/s 1 to 2000 ---
Pn107 Bias
rotational
speed
Sets position control bias. 0 r/min 0 to 450 ---
Appendix Chapter 6

 Loading...
Loading...





