5-13
5
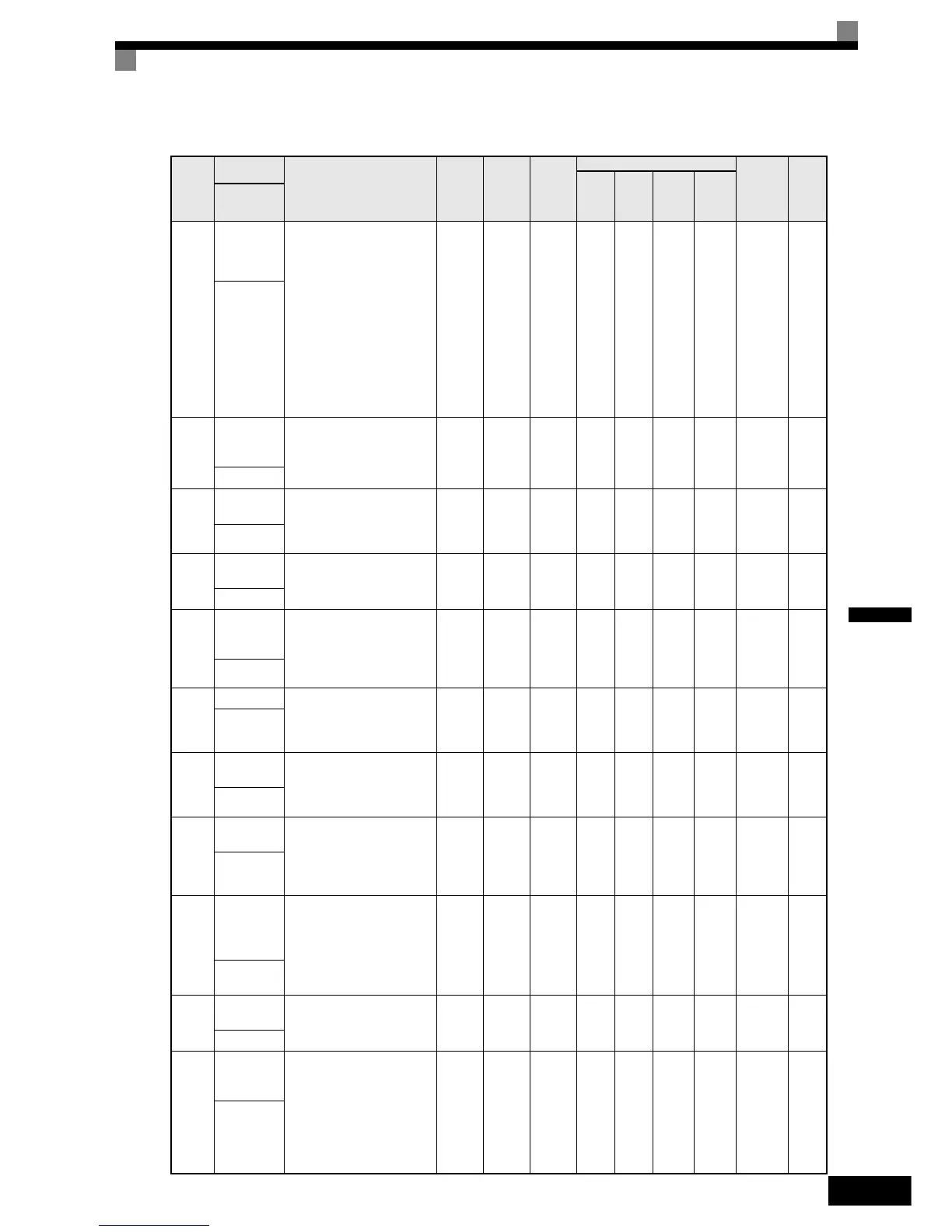
Contrôle PID : b5
Code de
para-
mètre
Nom
Description
Segment
de confi-
guration
Réglage
par
défaut
Modifica-
tion
pendant
fonction-
nement
Méthodes de contrôle
Registre
MEMO-
BUS
Page
V/f
V/f
avec
PG
Vecteur
en
boucle
ouverte
Vecteur
en
boucle
fermée
Affichage
b5-01
Sélection
du mode de
contrôle PID
0 : Désactivé.
1 : Activé (l'erreur est
contrôlée D).
2 : Activé (la valeur de retour
est contrôlée D).
3 : Contrôle PID activé
(fréquence de référence +
sortie PID, contrôle D
des erreurs).
4 : Contrôle PID activé
(fréquence de référence +
sortie PID, contrôle D
des valeurs de retour).
0 à 4 0 Non A A A A 1A5H 6-96
PID Mode
b5-02
Gain
proportionnel
(P)
Définit le gain proportionnel
(contrôle P).
Le contrôle P n’est pas exécuté
lorsque la valeur est 0,00.
0,00
à
25,00
1,00 Oui A A A A 1A6H 6-96
PID Gain
b5-03
Temps
intégral (I)
Définit le temps intégral
(contrôle I).
Le contrôle I n’est pas exécuté
lorsque la valeur est 0,0.
0,0 à
360,0
1,0 s Oui A A A A 1A7H 6-96
PID I Time
b5-04
Limite
intégrale (I)
Règle la limite de contrôle I en
pourcentage de la fréquence de
sortie maximale.
0,0 à
100,0
100,0 % Oui A A A A 1A8H 6-96
PID I Limit
b5-05
Temps
différentiel
(D)
Définit le temps différentiel
(contrôle D)
Le contrôle D n’est pas
exécuté lorsque la valeur
est 0,00.
0,00 à
10,00
0,00 s Oui A A A A 1A9H 6-96
PID D Time
b5-06
Limite PID Définit la limite après le
contrôle PID en pourcentage
de la fréquence de sortie
maximale.
0,0 à
100,0
100,0 % Oui A A A A 1AAH 6-96
PID Limit
b5-07
Réglage du
décalage PID
Règle le décalage après le
contrôle PID en pourcentage
de la fréquence de sortie
maximale.
-100,0
à
+100,0
0,0 % Oui A A A A 1ABH 6-96
PID Offset
b5-08
Constante de
retard PID
Définit la constante temporelle
du filtre de passage faible pour
la sortie de contrôle PID.
Définition généralement non
nécessaire.
0,00 à
10,00
0,00 s Oui A A A A 1ACH 6-96
PID Delay
Time
b5-09
Sélection des
caractéristiqu
es de sortie
PID
Sélectionne le sens avant/
inverse pour la sortie PID.
0 : Sortie PID normale
1 : Sortie PID inverse
0 ou 1 0 Non A A A A 1ADH 6-96
Output Level
Sel
b5-10
Gain sortie
PID
Définit le gain en sortie.
0,0 à
25,0
1,0 Non A A A A 1AEH 6-96
Output Gain
b5-11
Sélection
de la sortie
inverse PID
0 : Limite à 0 lorsque la sortie
PID est négative.
1 : Inversion lorsque la sortie
PID est négative.
La limite à 0 est également
active lorsque l'interdiction
d'inversion est sélectionnée
à l'aide de b1-04.
0 ou 1 0 Non A A A A 1AFH 6-96
Output Rev
Sel

 Loading...
Loading...







