6-98
6
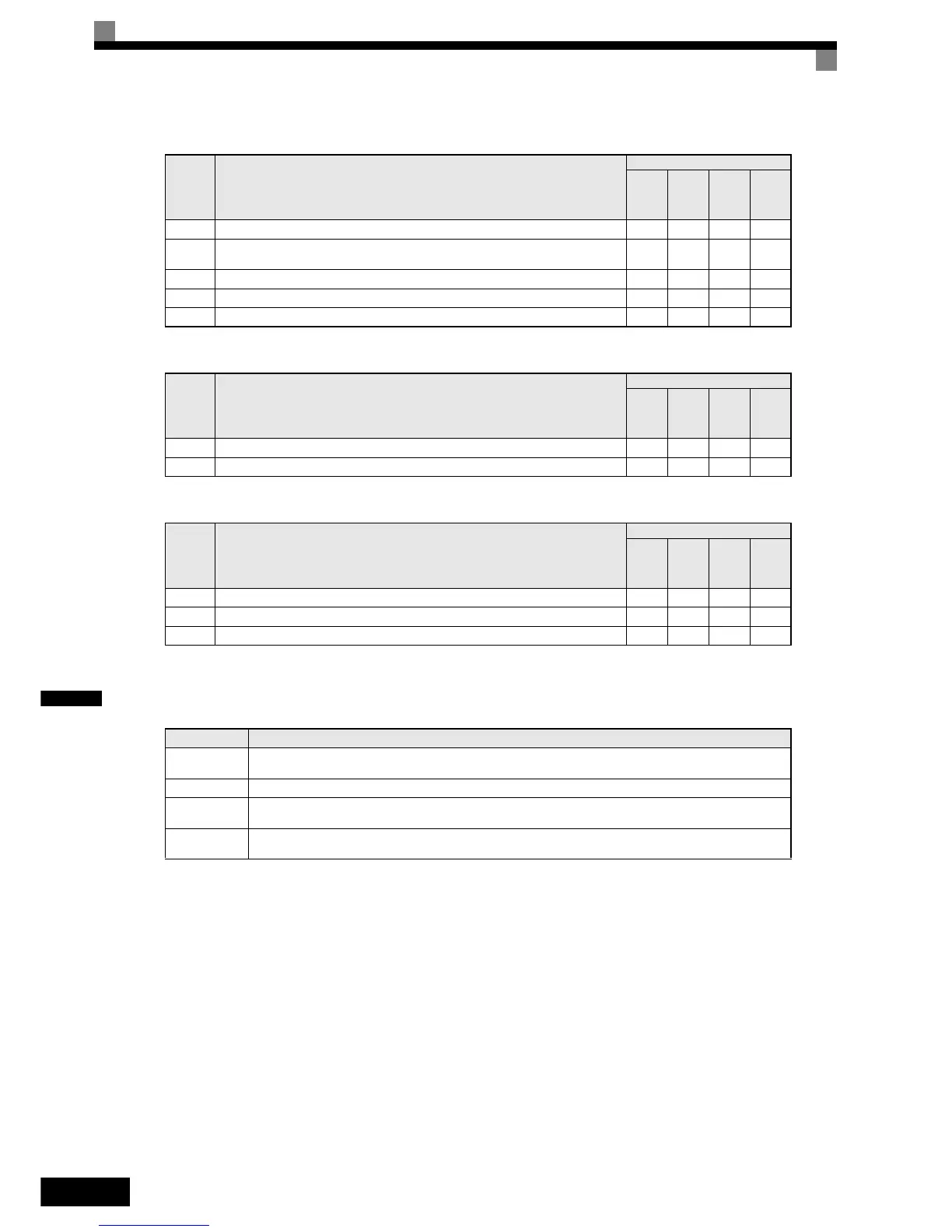
Entrées numériques multifonction (H1-01 à H1-05)
Entrée analogique multifonction (H3-09)
Entrée du train d’impulsions (H6-01)
Méthodes de contrôle PID (b5-01)
Il existe quatre méthodes de contrôle PID. Sélectionnez la méthode en définissant le paramètre b5-01.
Point de
consigne
Fonction
Méthodes de contrôle
V/f
V/f
avec
PG
Vec-
teur en
boucle
ouverte
Vec-
teur en
boucle
fermée
19 Désactivation du contrôle PID (ON : contrôle PID désactivé) Oui Oui Oui Oui
30
Réinitialisation intégrale du contrôle PID (réinitialisé lorsque la commande de réinitialisation est
entrée ou lors d’un arrêt pendant un contrôle PID)
Oui Oui Oui Oui
31 Maintien intégral du contrôle PID (ON : maintien intégral) Oui Oui Oui Oui
34 Démarreur en douceur PID Oui Oui Oui Oui
35 Interrupteur des caractéristiques d’entrée PID Oui Oui Oui Oui
Point de
consigne
Fonction
Méthodes de contrôle
V/f
V/f
avec
PG
Vec-
teur en
boucle
ouverte
Vec-
teur en
boucle
fermée
B Rétroaction PID Oui Oui Oui Oui
C Valeur cible PID Oui Oui Oui Oui
Point de
consigne
Fonction
Méthodes de contrôle
V/f
V/f
avec
PG
Vec-
teur en
boucle
ouverte
Vec-
teur en
boucle
fermée
0 Référence de fréquence Oui Oui Oui Oui
1 Valeur de rétroaction PID Oui Oui Oui Oui
2 Valeur cible PID Oui Oui Oui Oui
Point de consigne Méthode de contrôle
1
La sortie PID devient la fréquence de sortie du variateur et le contrôle D est utilisé dans l’écart (différence entre la valeur cible PID
et la valeur de rétroaction).
2 La sortie PID devient la fréquence de sortie du variateur et le contrôle D est utilisé dans la valeur de rétroaction PID.
3
La sortie PID est ajoutée comme valeur de compensation de la fréquence de sortie du variateur et le contrôle D est utilisé
dans l’écart (différence entre la valeur cible PID et la valeur de rétroaction).
4
La sortie PID est ajoutée comme valeur de compensation de la fréquence de sortie du variateur et le contrôle D est utilisé
dans la valeur de rétroaction PID.
 Loading...
Loading...








