Position coordinate management
149
4 EtherCAT communication
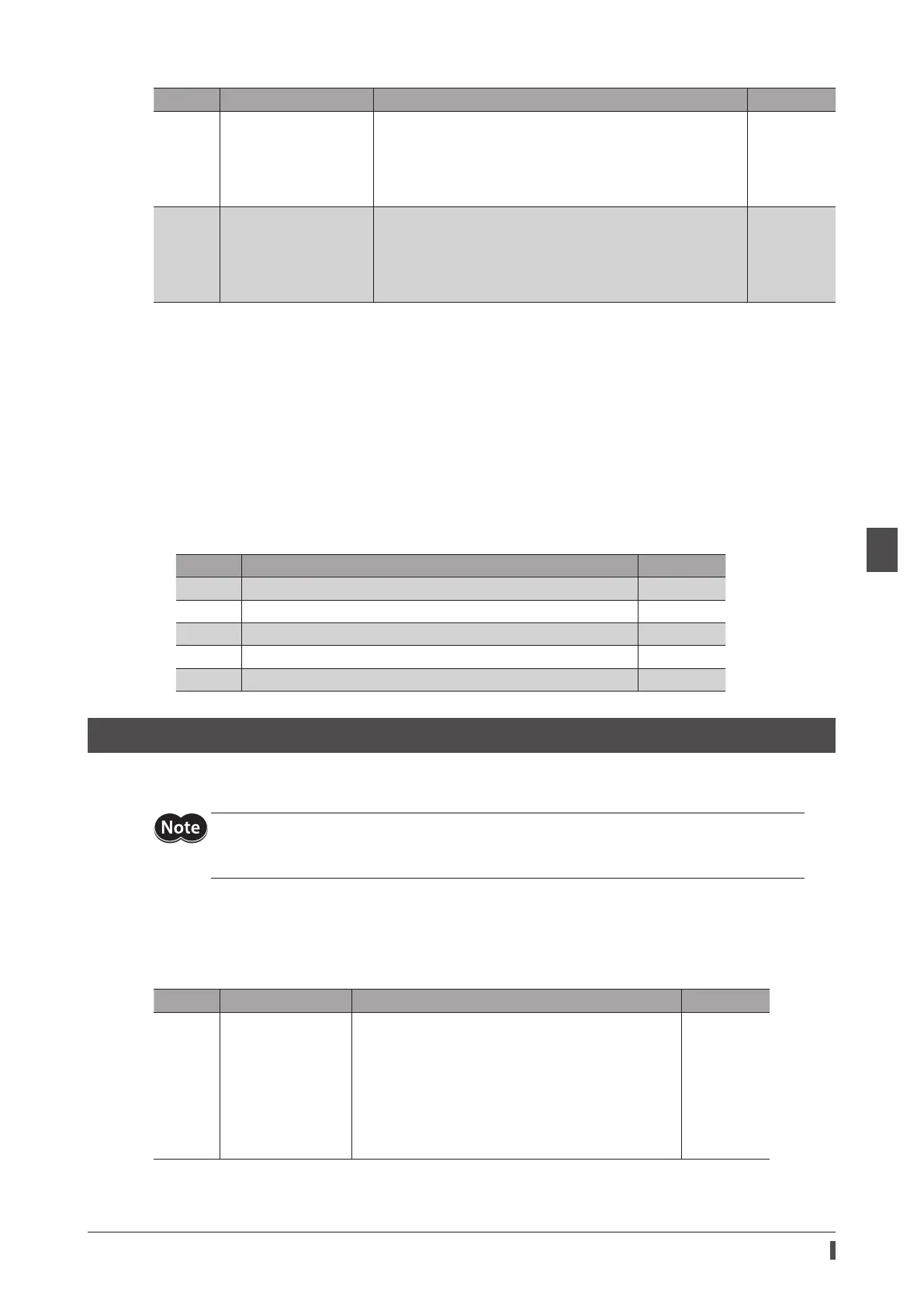
Index Parameter name Description Initial value
47F4h
Mechanism protection
parameter setting
Disables the ABZO setting of the mechanism protection
parameter.
Setting range
0: Follow ABZO setting
1: Disable
0
47F5h
JOG/HOME/ZHOME
operation setting
To change the parameter for JOG operation and return-to-
home operation, select manual setting.
Setting range
0: Prioritize ABZO setting
1: Manual setting
0
When the parameter of the wrap function is set
z
Setting example: When the wrap range is set to −50 to 50 revolutions
1. Change the "Initial coordinate generation & wrap coordinate setting (47F2h)" to "1: Manual setting."
When it is changed to "1: Manual setting," the following driver parameters can be set manually.
- Wrap setting
- The number of the RND-ZERO output in wrap range
- Initial coordinate generation & wrap setting range
- Initial coordinate generation & wrap range oset ratio
- Initial coordinate generation & wrap range oset value
2. Set each parameters as follows.
Index Parameter name Setting value
41C7h Wrap setting 1: Enable
41CDh The number of the RND-ZERO output in wrap range 1
41C9h Initial coordinate generation & wrap setting range [1=0.1 rev] 1,000
41CBh Initial coordinate generation & wrap range oset ratio [1=0.01%] 5,000
41CCh Initial coordinate generation & wrap range oset value 0 step
5-4 Mechanism settings parameter
The mechanism settings parameter is a parameter required for combined use with the mechanism such as the geared
motor and motorized actuator.
To change the mechanism settings parameter, change the "Mechanism settings (47F0h)" to "1:
Manual setting." [Initial value: 1 (Manual setting)]
When this parameter is changed, cycle the control power supply of the driver.
Motor rotation direction
Set the relationship between the coordinate system of the motor and the actual rotation direction.
Related parameter
Index Parameter name Description Initial value
41C2h
Motor rotation
direction
Sets the rotation direction of the motor output shaft.
Setting range
0: Positive side=Counterclockwise
1: Positive side=Clockwise
2: Positive side=Counterclockwise
(the driver parameter is applied)
3: Positive side=Clockwise
(the driver parameter is applied)
1

 Loading...
Loading...





