TTrraaddiittiioonnaall HHyyddrraauulliicc VVaallvvee CCoonnttrrooll eeqquuiivvaalleenntt
VVaallvvee MMooddee 44
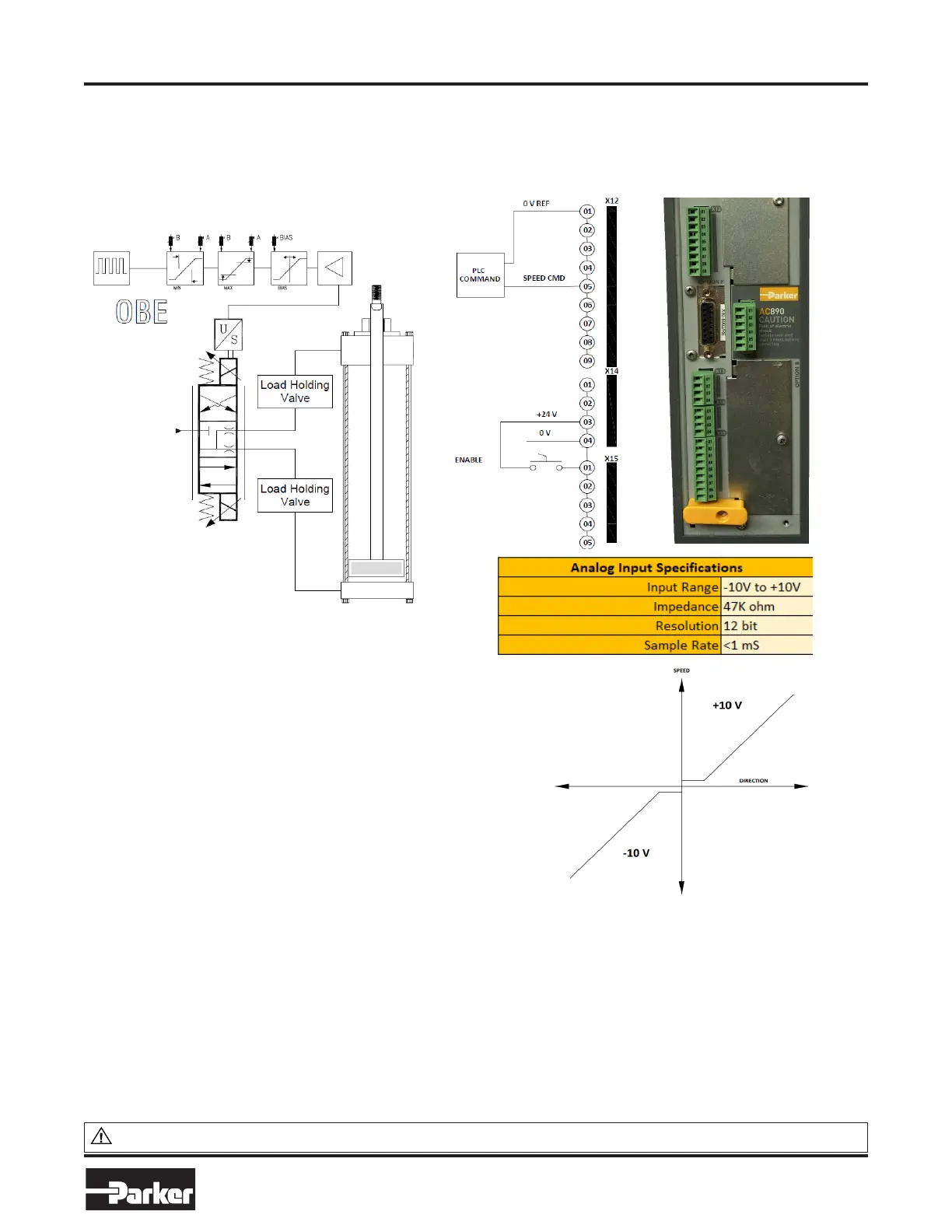
Through Keypad Entry the user may change the default value "0" to "4"
allows a infinite variable speed adjustment with a +10 to -10V DC analog
Input. This setting can be changed on the fly and is useful when
controlling a HAS unit with a Motion Controller. See page 22 for details
on how to change mode.
The sign (polarity) of the signal dictates the direction and magnitude
(value) controls the speed similar to the way a proportional valve control
the flow with a bipolar input.
During this mode the drive will gear the pump speed to the scaled range.
The drive will ramp in both directions, limited by the torque limiting value.
If a step command is issued, and the acceleration torque is greater than
the Torque limiting field set in the drive, the ramp rate will be dictated by
the this torque rating.
When controlling a HAS actuator with a closed loop motion controller, Mode 4 should be selected, and the default
minimum pump speed and input deadband will be automatically changed to maintain linear control as we approach null.
To minimize potential for hunting around null commands, the Drive Enable Control should be used in conjunction with the
imposition tolerance of the control scheme. Note: It is possible to use a HAS unit in a closed loop manner, however since
the control is not force-balance, and load holding valves are used, "servo" precise performance should not be expected.
Min pump speed and Signal dead band can be changed through the keypad, see full page 72 more details.
PPaarrkkeerr HHaannnniiffiinn CCoorrppoorraattiioonn
Cylinder Division
Des Plaines, Illinois
41
wwwwww..ppaarrkkeerr..ccoomm/
cylinder

 Loading...
Loading...







