Absolute rotary encoder P**58
Manufacturer specific encoder classes
Subject to reasonable modifications due to technical advances. Copyright Pepperl+Fuchs, Printed in Germany
Pepperl+Fuchs Group • Tel.: Germany +49 621 776-0 • USA +1 330 4253555 • Singapore +65 67799091 • Internet http://www.pepperl-fuchs.com
Date of issue 01/15/04
25
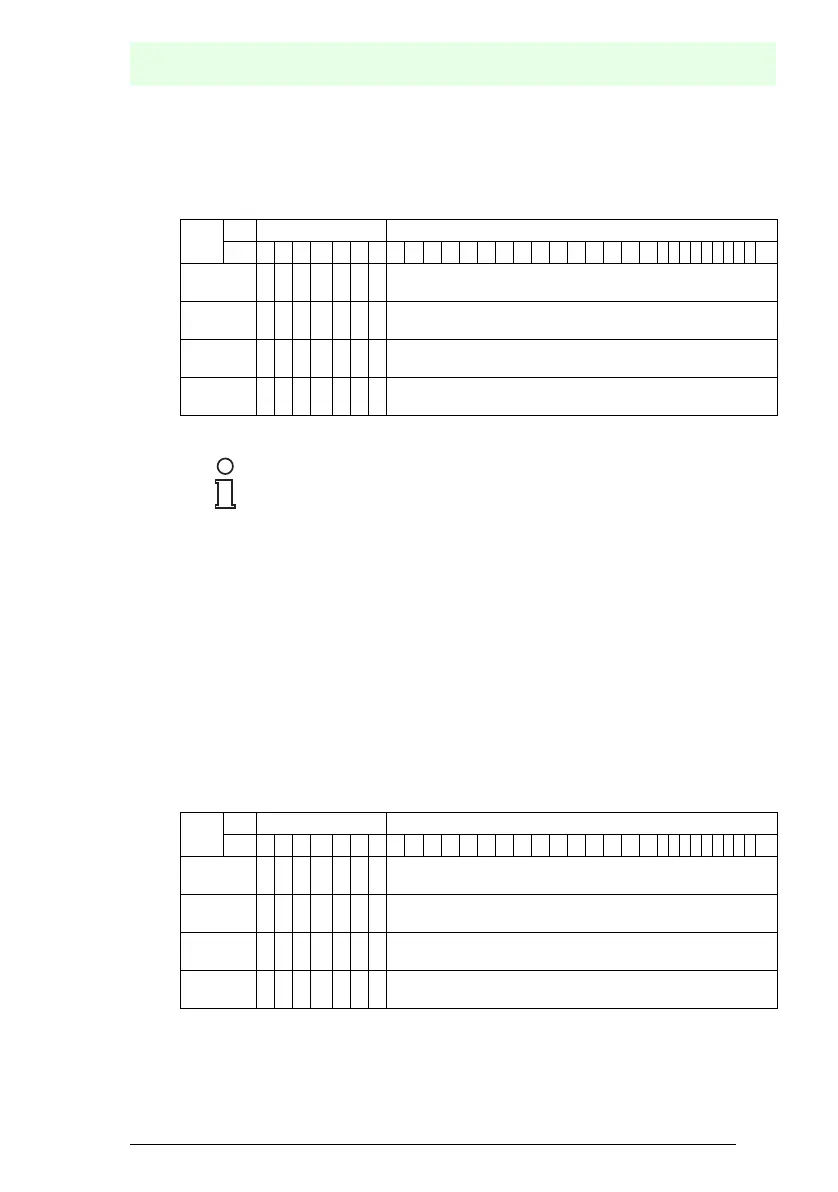
5.3.2 TEACH-IN start
After the system has been moved to the beginning of the measurement range, the
TEACH-IN start command is transferred to the rotary encoder. The device will now
start the measurement for determining the gear factor internally.
5.3.3 TEACH-IN stop
After the system is moved over the measurement range with the TEACH-IN stop
command, the number of steps desired over the measurement path must be
transferred. Care should be taken that the physical resolution is not exceeded.
Positive and negative direction as well as the zero point having been exceeded are
automatically taken into consideration. The measurement path that is traversed must
not exceed 2,047 revolutions.
In response to the TEACH-IN stop command, the rotary encoder transfers the overall
resolution calculated by the device. This value should be noted and accepted later for
normal operation of the system in projecting/parameter assignment.
After this procedure, the device works with the new scaling factor that has just been
determined. It is stored zero-voltage-safe in EEPROM.
Status bits Data bits
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 987654321 0
Master →
Encoder
0 1 0 0 0 0 0 start of TEACH-IN by setting Bit 30
Encoder
→ Master
0 1 0XX01
rotary encoder acknowledges start of TEACH-IN by setting
Bit 30
Master →
Encoder
0 0 0 0 0 0 0 reset Bit 30
Encoder
→ Master
0 1 0XX01
output of uncalculated feedback value (gear factor = 1,
Preset not active)
The gear factor is set to 1 internally; the zero point offset is deleted.
Status bits Data bits
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 987654321 0
Master →
Encoder
001 0 0 0 0 number of desired steps via measurement path traversed
Encoder
→ Master
011 XX01
determination of overall resolution for new gear factor (should
be noted for later reference)
Master →
Encoder
000 0 0 0 0 reset Bit 29
Encoder
→ Master
000 X X 0 1 output of actual value calculated with the new gear factor
Note