横流れなどの特定の環境条件により、舵が中央にある場合でも、オートパイロットシステムが左舷または右舷に執拗
に操舵されることがあります。
舵角基準センサー / トランスデューサーをオートパイロットシステムに接続すると、オートパイロットコントロー ル
ヘッドを使用してオフセット角を+/-度単位で指定し、そのような条件によって生じる不正確な舵角情報を 補正する
ことができます。
舵角情報が正確であればあるほど、オートパイロットシステムはより正確に正しいコースを 保持することができま
す。
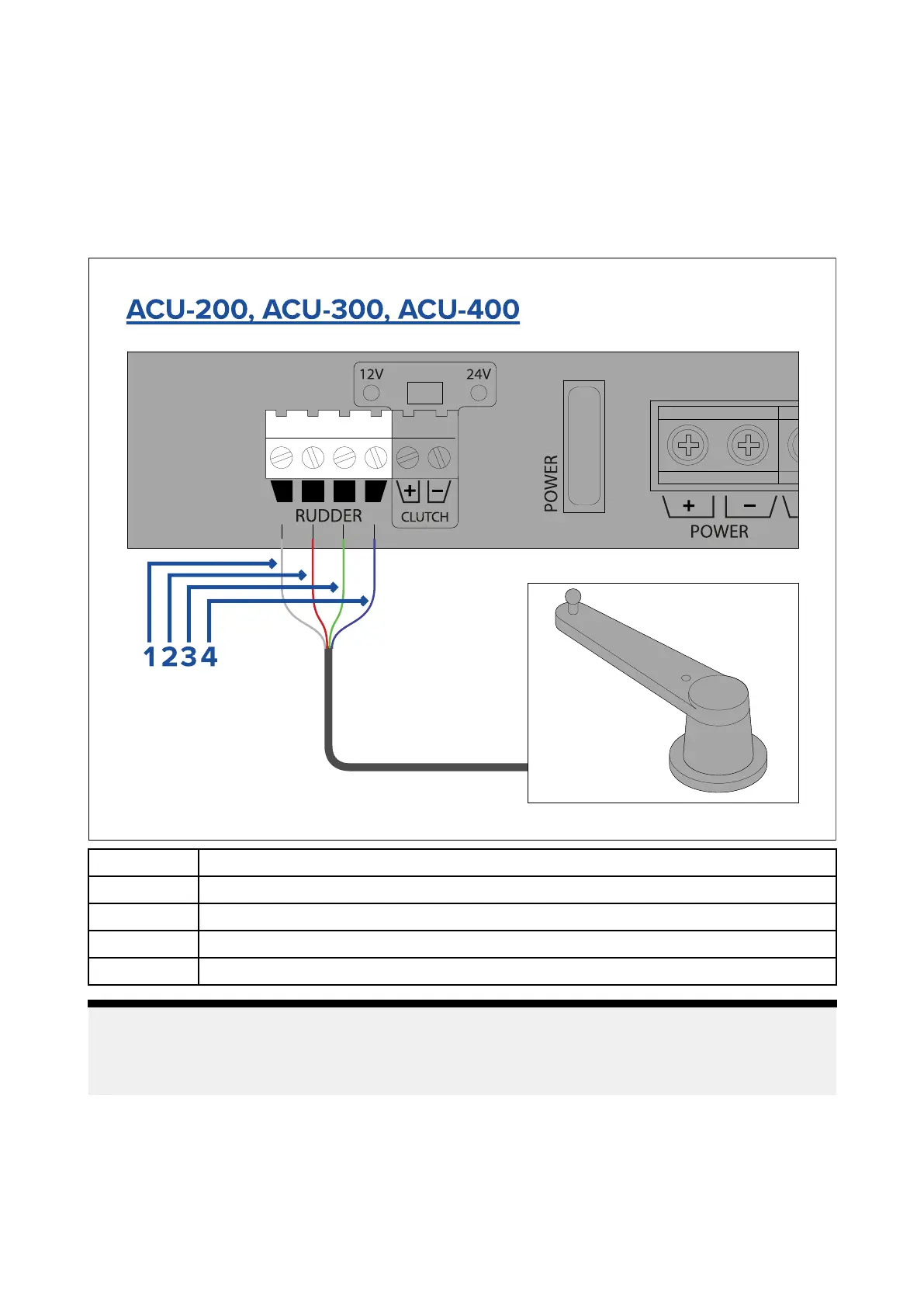
Item Wire color — ACU-200, ACU-300, ACU-400
1
Gray (screen)
2
Red
3 Green
4 Blue
Note:
ラダーリファレンス情報のソースが複数ある場合、Evolutionシステムのコンポーネントは、Evolution ACUに
直接接続されていないラダーリファレンスユニットからのラダー入力を無視します。
ACU-200, ACU-300,ACU-400connections
101