02.05 9 SIMOSTEP specifications
© Siemens AG 1998 All Rights Reserved
FM-STEPDRIVE/SIMOSTEP (FB)
9-5
3-phase stepping
motors with holding
brake
The holding brakes are used to hold the motor in position when the motor
current is switched off. In cases of emergency, e.g. power failure or
EMERGENCY OFF, they stop the drive, thus contributing to the safety of
the system. The brakes are required for applications in which gravity
forces play a role, e.g. Z-axes in handling systems.
!
Caution
In order to ensure reliable functioning of the Z axes with holding brakes,
the statical loading torque should not exceed a maximum of 25% of the
motor holding torque.
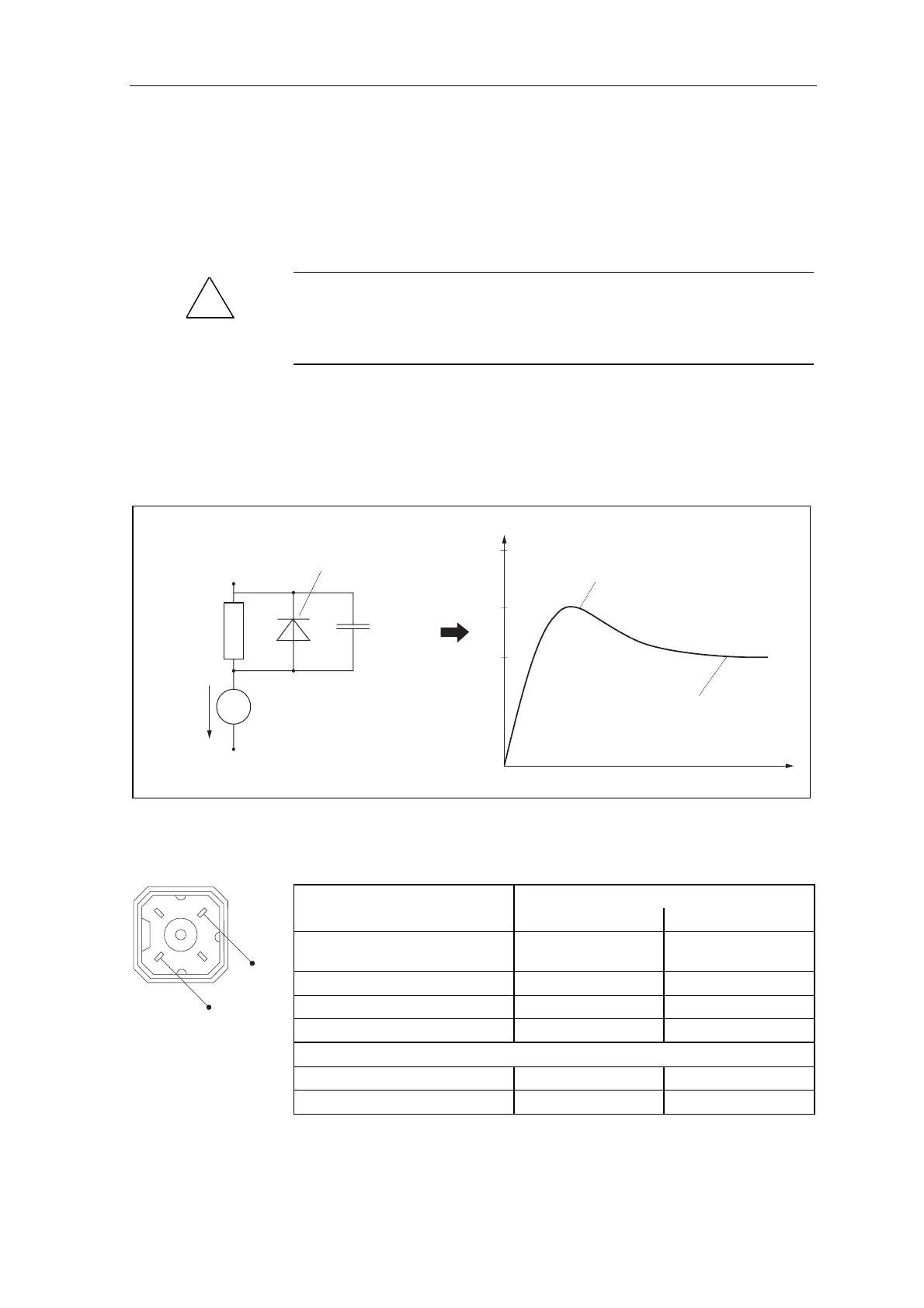
Function
The holding brakes are designed as electromagnetic spring pressure
brakes. In order to disengage the brake, it must be electrically excited
when the motor current is switched on. To avoid high temperature of the
brake, the current for the brake is reduced to holding voltage when the
brake is still disengaged (see figure 9-5).
4700 µF/18 V
for 1FL304X
U
3
[V]
Starting voltage
Holding voltage
t
24
75%
50%
24 V
Brake
0 V
U
3
+
1 N 4001
6800 µF/18 V
for 1FL306X
24 Ω min. 6 W
for 1FL304X
18 Ω 8 W
for 1FL306X
Figure 9-5 Example of a circuit to reduce dissipation of the holding brake
Performance data of holding brake
Specifications Motor-size
90 110
Nominal voltage
(power supply via pin 1 and 2)
24 V 24 V
Holding torque 6 Nm 16 Nm
Power consumption 24 W 32 W
Moment of inertia 0,2 kgcm
2
0,35 kgcm
2
Switching times
On (disengage brake) 35 ms 65 ms
1
3
2
24VDC
non-polarized
Terminal assigment
Off (engage brake) 15 ms 15 ms