Getting Started
A5E36037886-003, 04/2017
69
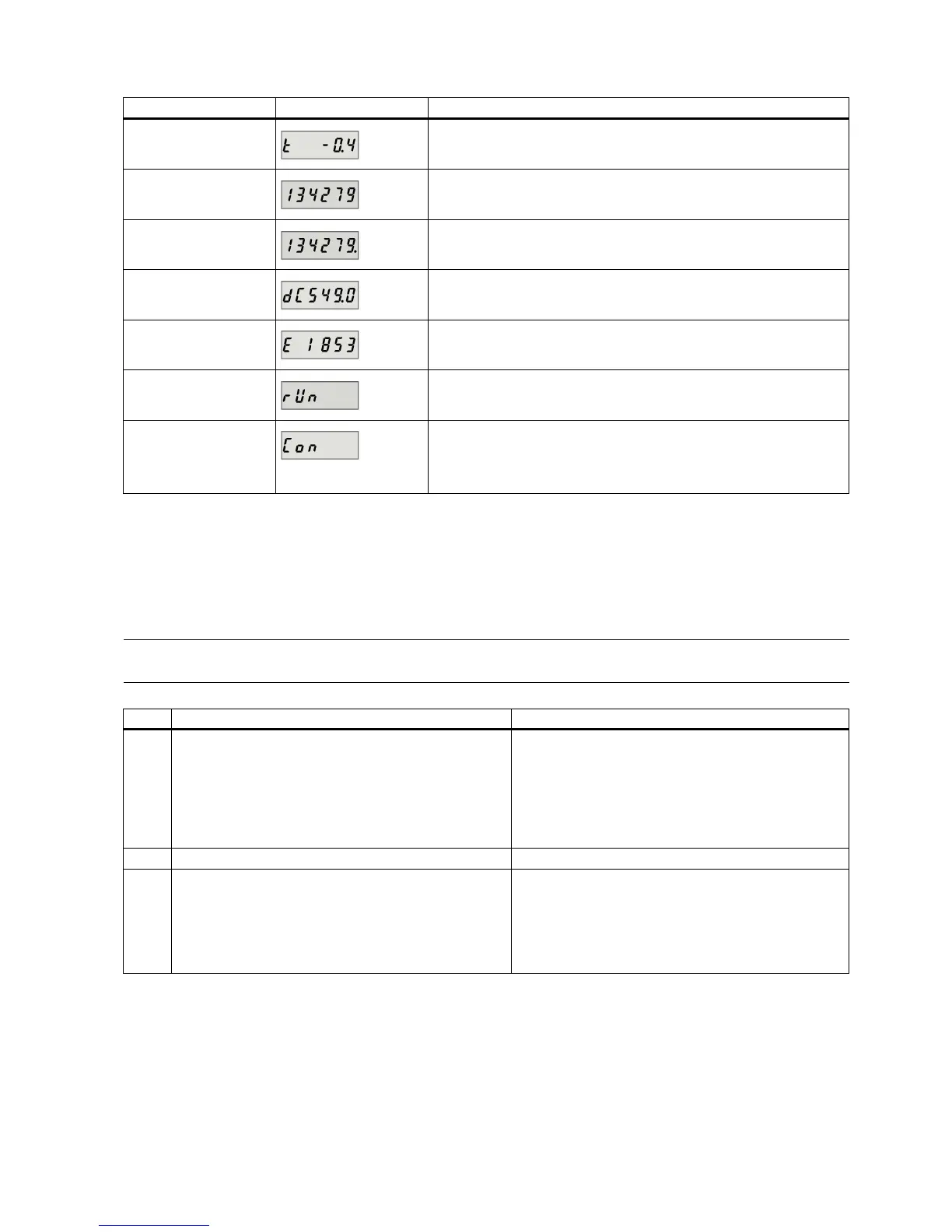
T -x.x
Actual torque (negative direction)
xxxxxx
Actual position (positive direction)
xxxxxx.
Actual position (negative direction)
DCxxx.x
Actual DC link voltage
Exxxxx
Position following error
run
The motor is running
Con
The communication between the SINAMICS V-ASSISTANT and the
servo drive is established.
In this case, the BOP is protected from any operations except clearing
alarms and acknowledging faults.
Initial commissioning in JOG mode
Prerequisites
The servo drive is connected to the servo motor without load.
Note
The digital signal EMGS must
be kept at high level (1) to ensure normal operation.
1 Connect necessary units and check wirings. It is necessary to connect the following cables:
• Motor cable
• Encoder cable
• Brake cable
• Line supply cable
•
Switch on the 24 VDC power supply.
3 Check the servo motor type.
• If the servo motor has an incremental encoder, input
motor ID (p29000).
• If the servo motor has an absolute encoder, the
servo drive can identify the servo motor automatical-
occurs when the servo motor is not identi-
fied.
You can find the motor ID from the motor rating plate.
Refer to the descriptions about the motor rating plate in
"Motor components (Page 14)".

 Loading...
Loading...









