The following table gives you an overview of the encoders that can be connected and what
you should take into account here.
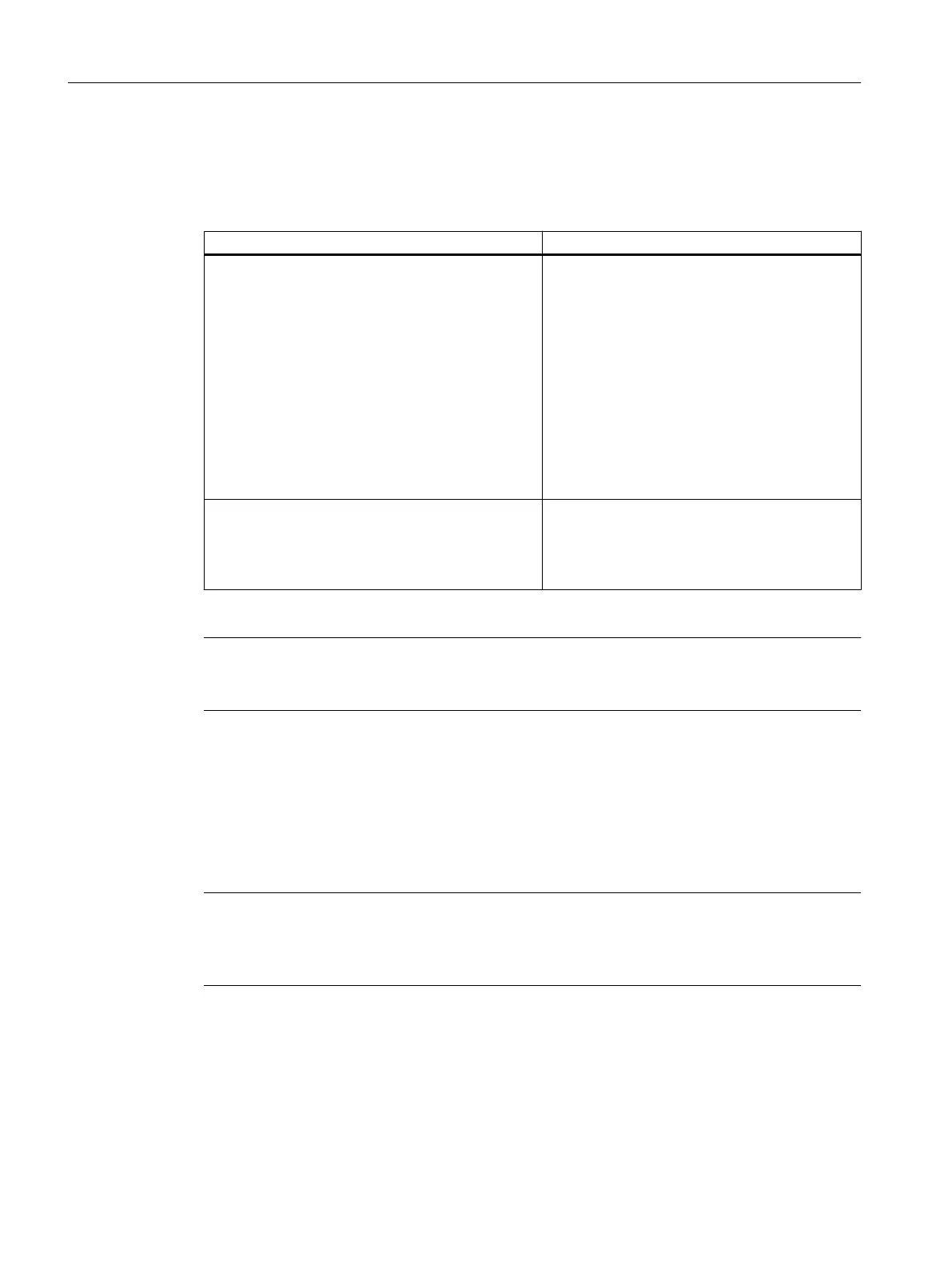
Table 4-11 Encoders which can be connected
Encoder Connection to X3 to X6 of the C230-2/C240
Rotary encoders
● Incremental encoders with 5 V encoder power
supply and TTL/RS422 interface
● Incremental encoders with 24 V encoder power
supply and TTL/RS422 interface
● Absolute encoders (single/multi-turn) with 24 V
encoder power supply and SSI interface
● Shaft position encoders with 5 V encoder power
supply and TTL/RS422 interface
● Rotor position encoder with SINE signals
● Resolver
● Direct
● Direct
● Direct
● Direct
● Via SIMODRIVE drive control using
incremental shaft encoder (WSG) interface
● Via SIMODRIVE resolver control using
incremental shaft encoder (WSG) interface
Linear encoders
● Length measurement systems with 5 V encoder
power supply and TTL/RS422 interface
● Linear encoders with SINUSOIDAL signals
● Direct
● Via EXE (external pulse shaper electronics)
Note
If you operate drives via the PROFIBUS DP, you do not need to connect any encoders to this
interface. The encoders are connected directly to the drive.
Encoder emulation (incremental shaft encoder (WSG) interface)
If the drive unit is equipped with encoder emulation, this can be connected instead of an
encoder. The drive control analyzes the information from a rotor shaft angle encoder and
provides information on the actual position to this interface by emulating the signals of an
incremental encoder.
Note
Please note the drive manufacturer's wiring specifications. As the encoder interface of the
C230-2, C240 is non-isolated, it may be necessary to take special measures for EMC on a
case-by-case basis.
Interfaces
4.6 Onboard measuring system interface (C230-2, C240)
SIMOTION C
58 Operating Instructions, 11/2016, A5E33441428B