Control Mode:S
Range:0~300
Data size:16bit
Display mode:Decimal system
Parameter function:Simulation speed instruction zero fixed value setting is namely zero clamp.
When servo drive chooses speed mode and speed instruction given by external analog value, the analog voltage is 0, because of external
electromagnetic interference or zero drift and so on, can lead to motor can't rest. If need external analog input voltage near 0 V, the motor
must be stationary, then you can use this function.
When this function is adopted to meet the following two conditions:
The absolute value of the speed instruction that input analog voltage corresponding is less than P1-44;
The drive is defined as DI terminal of zero fixed signal ZCLAMP is effective.
When the above conditions are satisfied, servo drive switch from the speed mode to position mode automatically, make the motor in the
position to lock within ±1 pulse. Even under the action of external force, also returns zero clamp position.
NOTE:When use 2500ppr encoder, it‘s ±1pulse,When use 17bit encoder, it‘s ±3pulse.
Control Mode:P S T
Range:0~3
Data size:16bit
Display mode:Decimal system
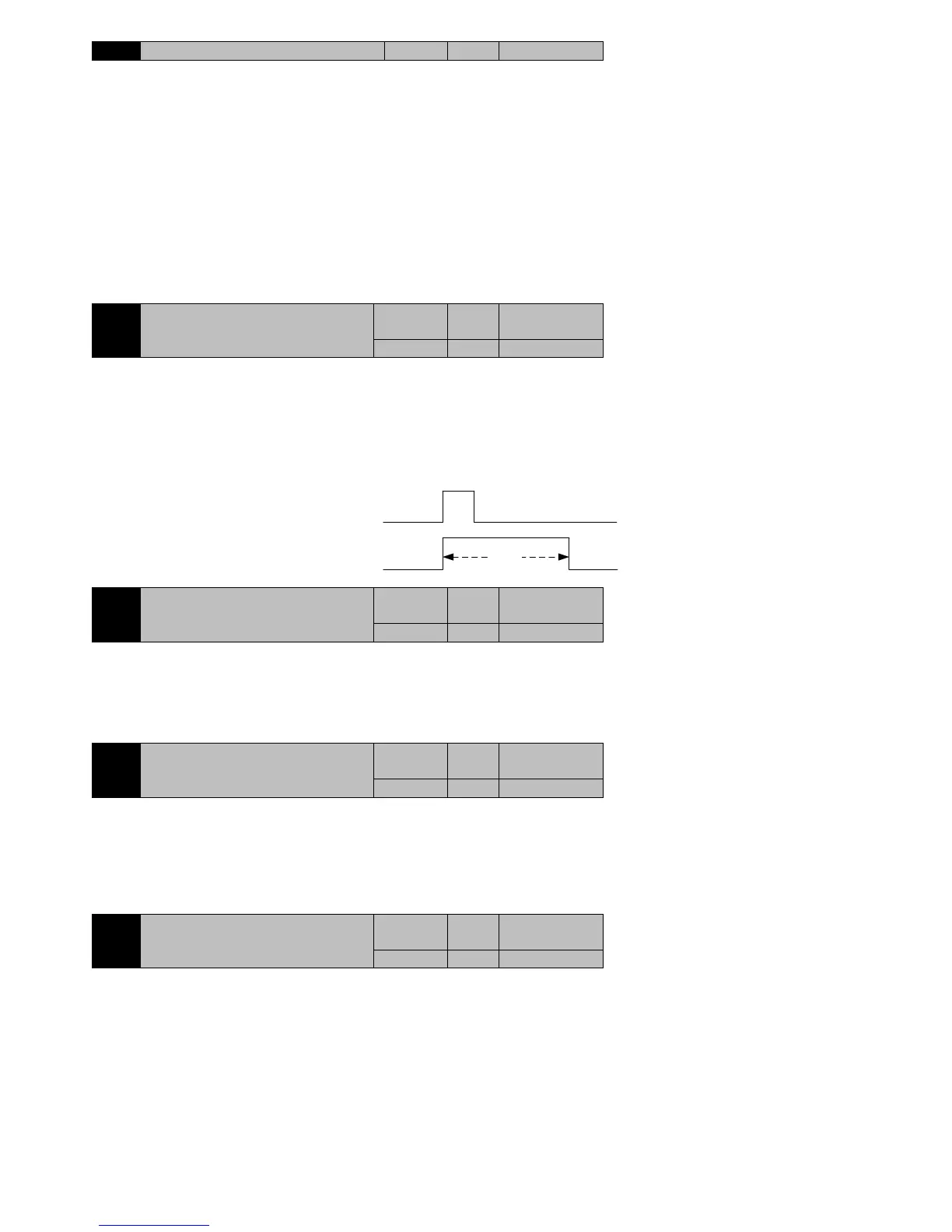
Parameter function:Broadening of Z pulse. when PC can‘t capture a narrow Z pulse, then can broaden it.
Because the width of Z pulse will decrease with motor speed increase, for the convenience of matching with all kinds of PC, Z pulse width can
be adjusted according to actual situation. It set to 0 represents the output of Z pulse is original width of encoder Z signal.
Z pulse
P1-45
EXTZ
Z Pulse
broadening
Forward the maximum torque limit
Control Mode:P S T
Range:0.0~350.0
Data size:16bit
Display mode:Decimal system
Parameter function:When P1-48=0, set forward direction, the limiting value of the motor output torque. The rated torque of the motor is
benchmark.
Inversion the maximum torque limit
Control Mode:P S T
Range:0.0~350.0
Data size:16bit
Display mode:Decimal system
Parameter function:When P1-48=0, set inversion direction, the limiting value of the motor output torque. The rated torque of the motor is
benchmark.
Torque limit source selection
Control Mode:P S T
Range:0~3
Data size:16bit
Display mode:Decimal system
Parameter function:Choosing the source of the motor output torque is limited.
P1-48=0:internal limit P1-46、P1-47 ;
P1-48=1: analog value1 limit,would be limited by P1-46、P1-47 at the same time;
P1-48=2: analog value2 limit,would be limited by P1-46、P1-47 at the same time;
P1-48=3:hold;
The meaning of the torque limit shown as follow