Operation and Installation CD401MR-SC
Date: 2022-09-26Page 38 of 48
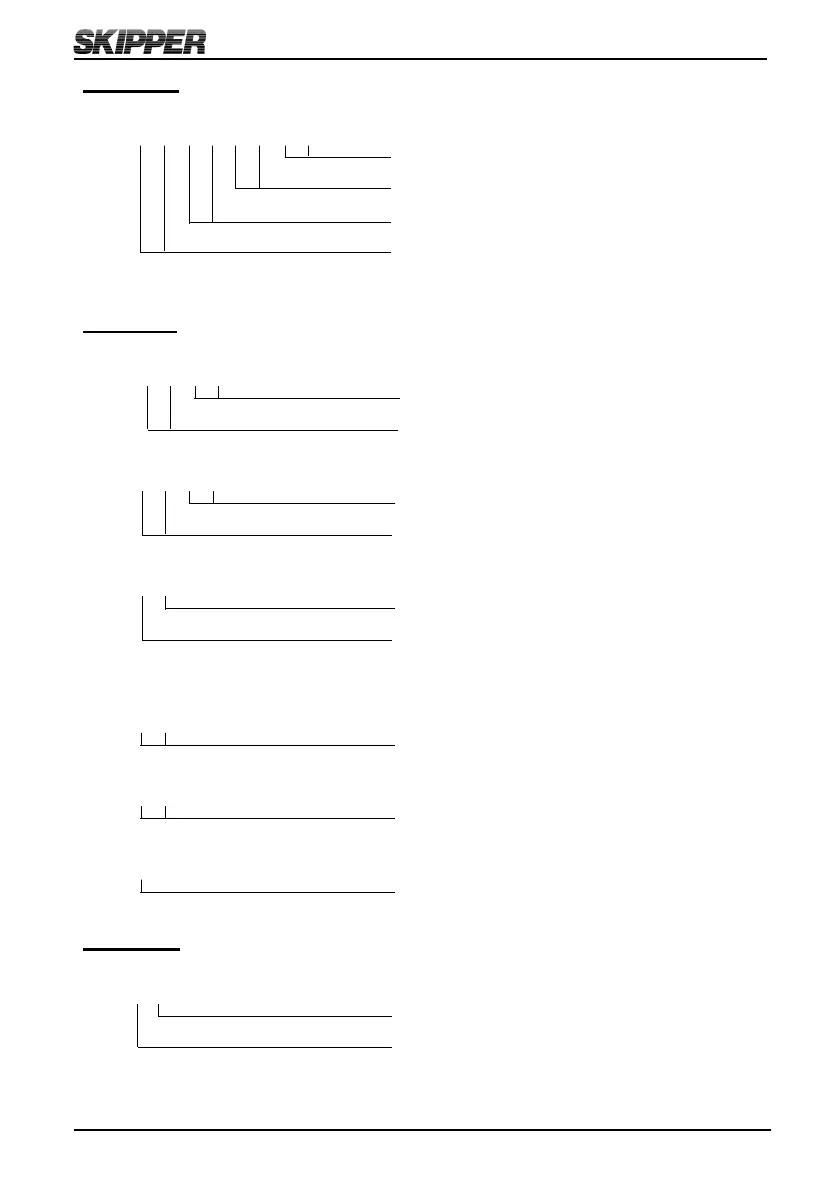
Distance:
Parameter
name
Dual Ground/Water Speed
$--VLW, x.x, N, x.x, N, x.x, N, x.x, N*hh<CR><LF>
Ground distance since reset TRIPB
Total cumulative ground distance TOTLB
Water distance since reset TRIPW
Total cumulative water distance TOTLW
Note: All distance values must be specied in nautical miles.
Heading:
Parameter
name
Water Speed and Heading
$--VHW, x.x, T, x.x, M, , , ,*hh<CR><LF>
Heading, degrees magnetic
HDW-M
Heading, degrees true
HDW-T
Course Over Ground and Ground Speed
$--VTG, x.x, T, x.x, M, , , ,*hh<CR><LF>
Course over ground, degrees magnetic
COG-M
Course over ground, degrees true
COG-T
True Heading and Status
$--THS, x.x, a*hh<CR><LF>
Mode indicator (see Note)
Heading, degrees true
THS
Note: The Mode indicator is ignored
Heading True
$--HDT, x.x, T*hh<CR><LF>
Heading, degrees true
HDT
Heading Magnetic
$--HDM, x.x, M*hh<CR><LF>
Heading, degrees magnetic
HDM
Heading, Deviation and Variation
$--HDG, x.x, , , ,*hh<CR><LF>
Magnetic sensor heading, degrees
HDG
Rotation:
Parameter
name
Rate Of Turn
$--ROT, x.x, A*hh<CR><LF>
Status: A=data valid, V=data invalid
Rate of turn (
O
/min), ”-” = bow turns to
port
ROT