5-59
Applying conditions of Auto tuning
The Servo drive provides Auto tuning and uses an advanced control technique “ON-LINE” to measure
the Load Inertia Ratio to control the system to achieve default speed or Position Response Bandwidth.
System must comply with the conditions below, so that the Auto tuning can operate normally.
(1) The timing from stop to 2000rpm needs be less than 1 second.
(2) Motor speed is larger than 200rpm.
(3) Load Inertia needs be 100 times less than the inertia of the motor.
(4) External force or the variation of inertia ratio can not be excessive.
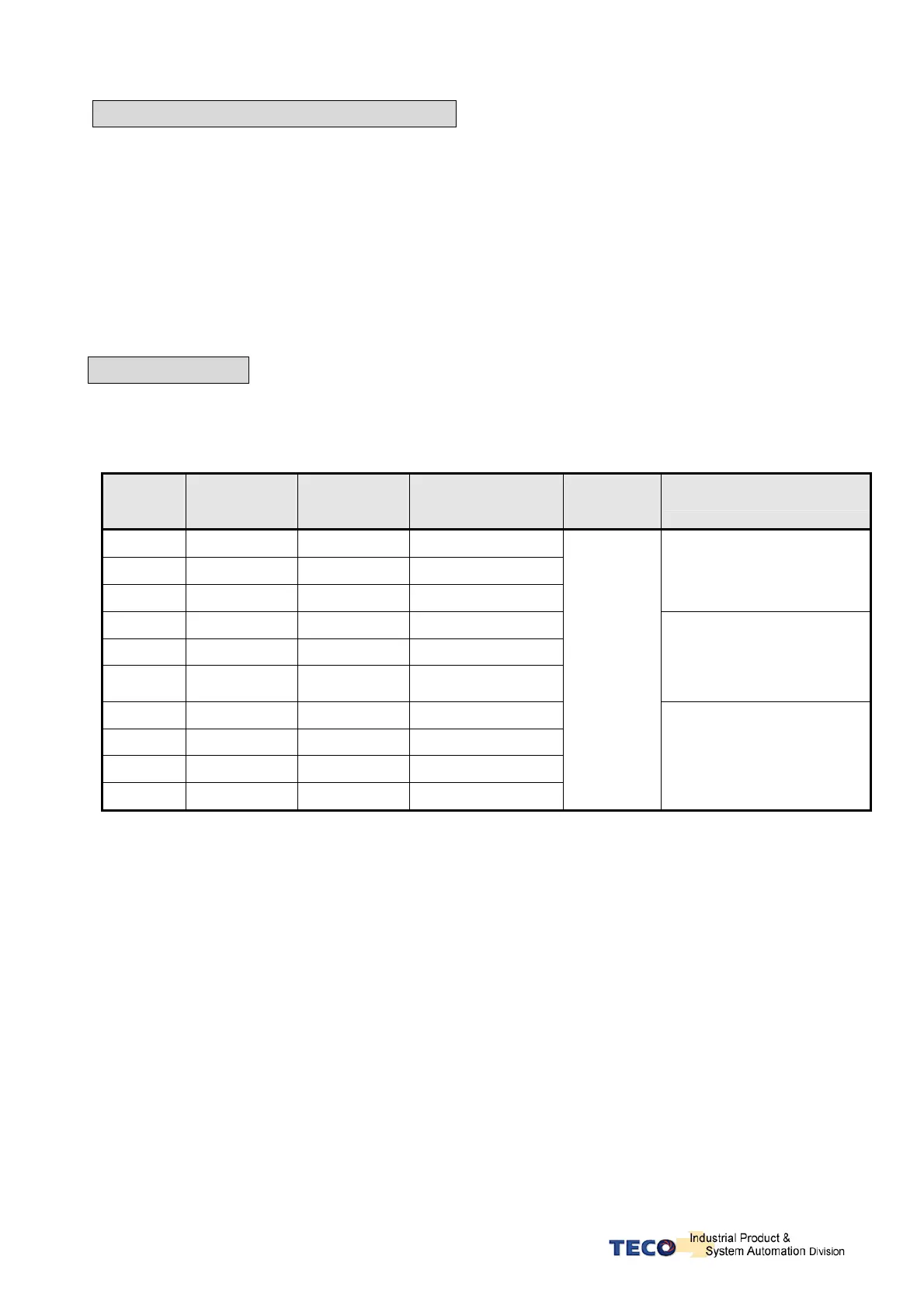
Rigidity Setting
When Auto tuning is used, set the Rigidity Level depending on the various Gain settings for
applications such as those listed below:
Rigidity
Setting
Cn026
Position Loop
Gain
Pn310 [1/s]
Speed Loop
Gain
Sn211 [Hz]
Speed-loop Integral
time constant 1
Sn212 [x0.2msec]
Mechanical
Rigidity
Application
1 15 15 300
2 20 20 225
3 30 30 150
Machines driven by timing
Belt, Chain or Gear: Large
Moving Table, Conveyor Belt.
4 40 40 100
5 60 60 75
6 85 85 50
The machines driven by
Ballscrew through
decelerator: Ordinary
machines, Mechanics arms,
robot arms, conveyor.
7 120 120 40
8 160 160 30
9 200 200 25
A 250 250 20
Low
Middle
High
The machines driven by
Ballscrew: High precision
Machines, Metal engraving
Machine, Insertion Machine
and IC inspection Machine.