– 32 –
STE 71282
STARTUP MANUAL
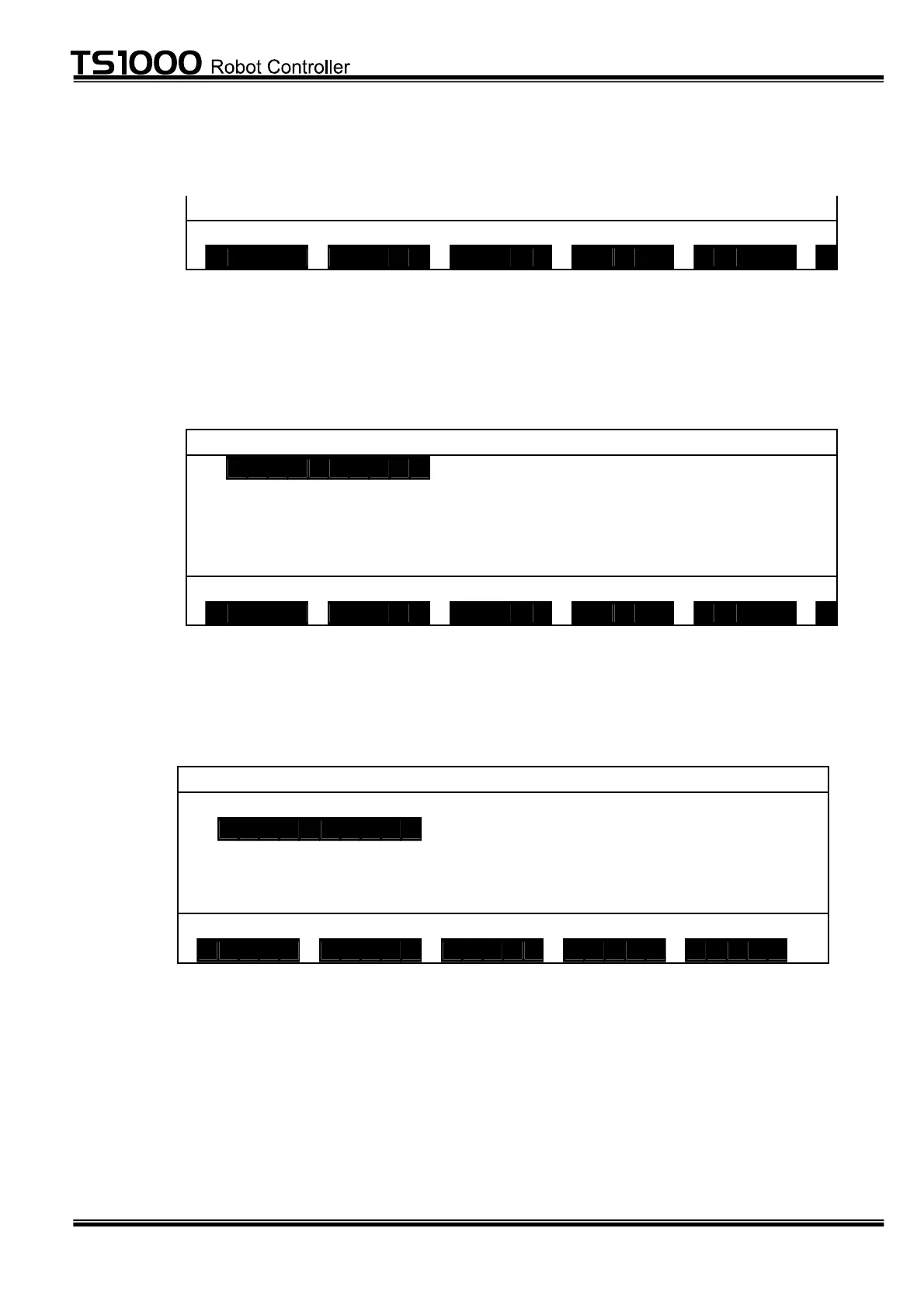
[8] Press the [F3] key and teach the current robot position.
T E A C H : P R E S S < E X E > w / . w o r l d
N O S A V F I N D T E A C H M – T O C U T >
When the above screen appears, press the EXE key. (To cancel, press
another key.)
[9] Now, the current robot position has been taught.
P O I N T X Y Z
P 1 = 250, 250 , 1 10,
w/.w o r l d
S A V E D E D I T F U L L T R A N S P Y L D >
[10] Press the INS key and add the "P2" data.
The procedures are the same as in the "P1" data. Observe Steps [3] through
[9] above. (Manually guide the robot to a position which is different from "P1".)
P O I N T X Y Z
P 1 = 2 5 0 , 2 5 0 , 1 1 0 ,
P 2 = 321, –234 , 5 6
w/.w o r l d
S A V E D E D I T F U L L T R A N S P Y L D
>

 Loading...
Loading...





