INTERFACE MANUAL
[Type P] (When X8HI printed board is used)
1
2
3
4
5
8
Robot
7
FG
JOEP-1
( ): Signal name of DIN
command
(204)
(205)
(203)
(202)
(201)
P24G
( ): Signal name of DOUT
command
6
9
10
PCR-E20FS
JOEP-2
JOEP-3
JOEP-4
JOEP-5
J6C-1
JOFP-1
JOFP-2
JOFP-4
JOFP-5
J6C-2
JOFP-3
JOFP-6
JOEP-6
JOEP-7
Brake
P24G
JOES-1
JOES-2
JOES-3
JOES-4
JOES-5
J3D-1
J4D-1
JOFS-1
JOFS-2
JOFS-4
JOFS-5
J3D-2
J4D-2
JOFS-3
JOFS-6
JOES-6
JOES-7
P24V
(204)
(203)
(202)
(201)
TS2000/TS2100
robocontroller
(X8HI printed board)
Robot control signal cable
CN4
Sink type
( common)
"-"
Source type
("+ " common)
P24V
P24V
P24V
11
Case
13
16
12
14
15
17
18
19
20
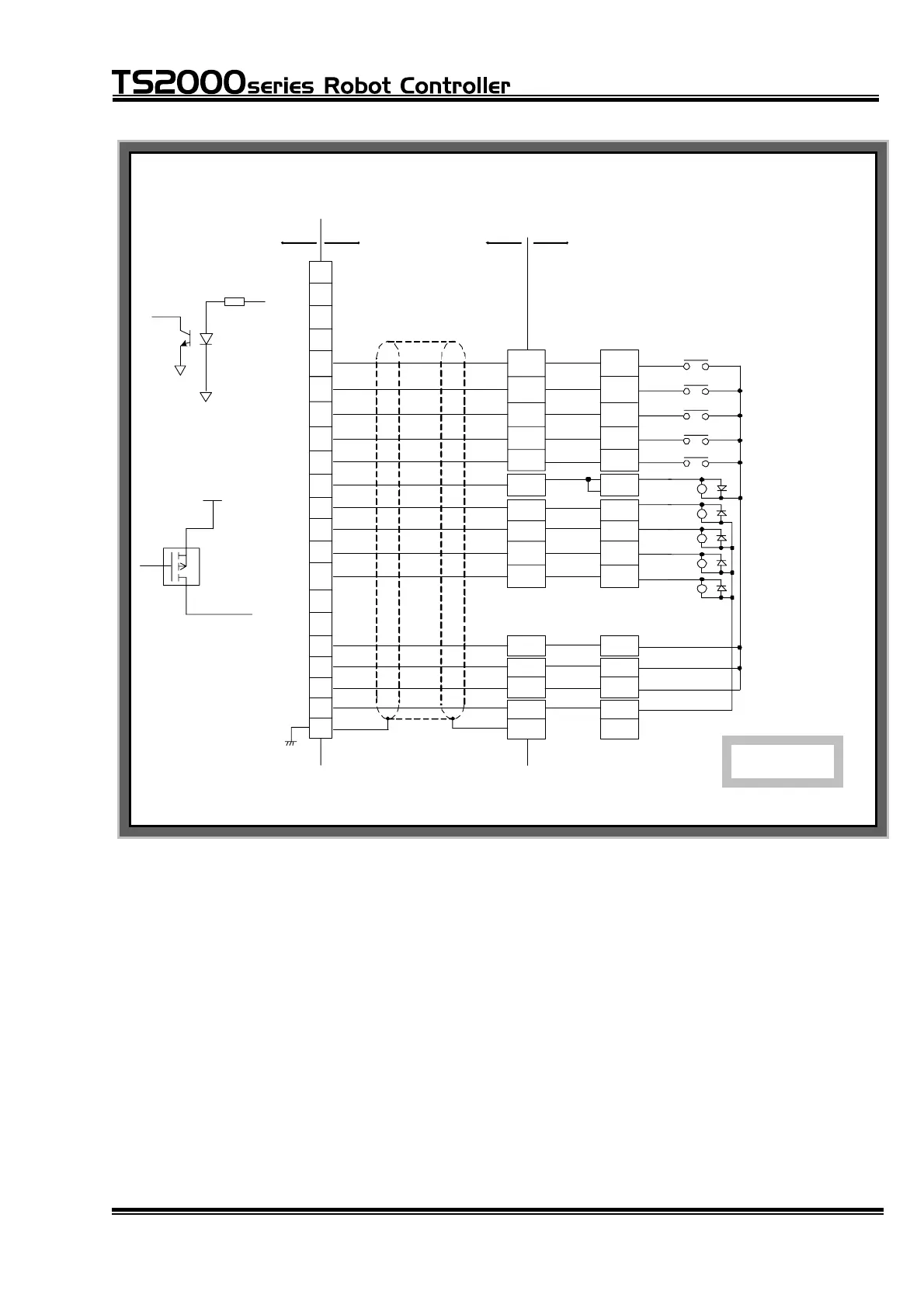
Type P
Fig. 3.5 Connection of robot control signal cable (Type P)
The robot control signal controls ON/OFF of the brake for securing the motor shaft,
and the end effector such as hand operation.
The TS2000/TS2100 controller is provided with five (5) hand input signals and four
(4) hand output signals to control the end effector.
The specifications of the hand input signal are same as those of the digital input
signal. The output type, output circuit structure and electric rating of the hand
output signal differ from those of the digital output signal, as described below.
STE 71367
– 23 –

 Loading...
Loading...





