INTERFACE MANUAL
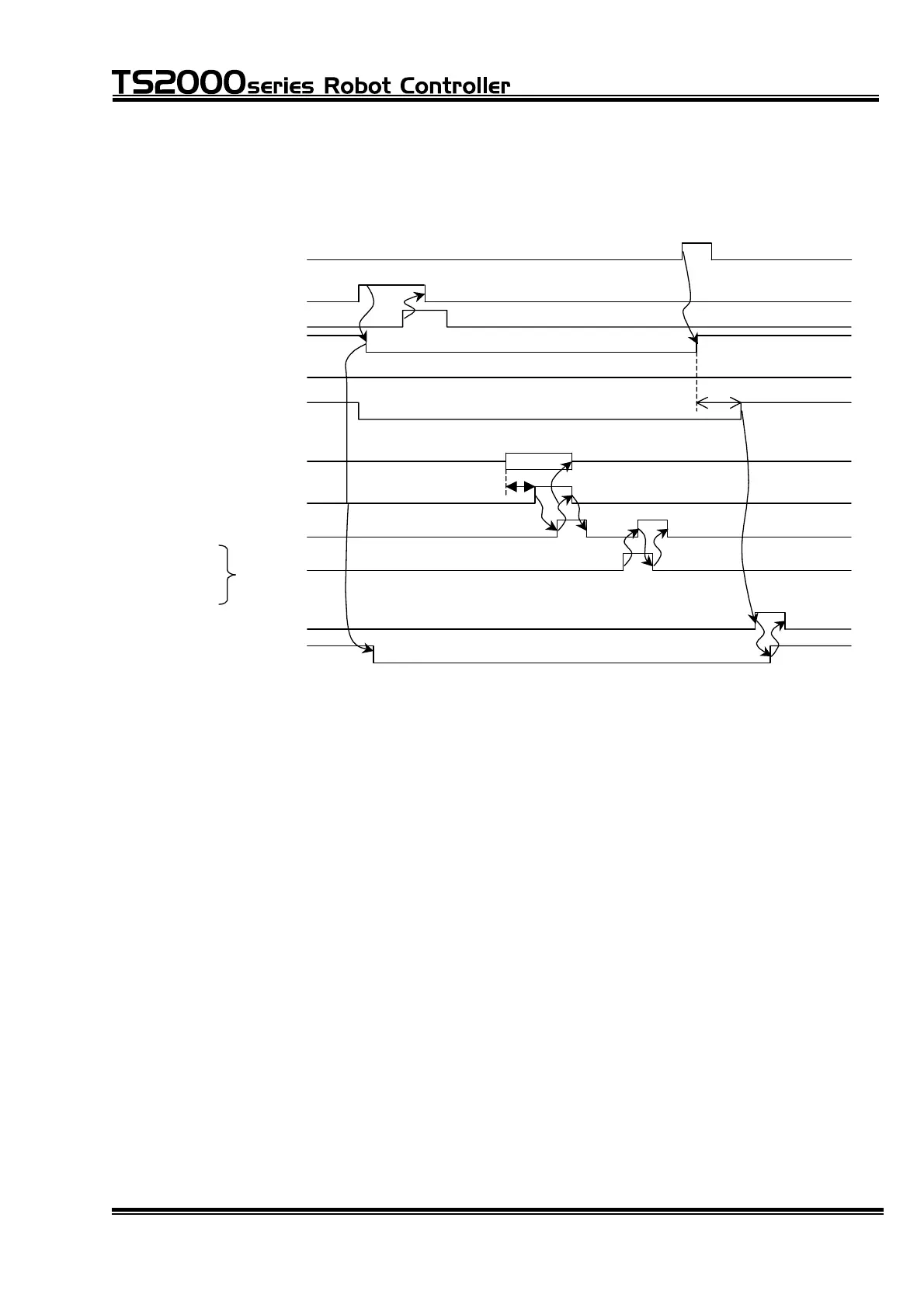
(4) Example of restarting the robot after error correction
To resume the automatic operation after an error has occurred (i.e., processing
of automatic operation after error correction):
EX_SVON (I)
LARM (O)
LM_RST (I)
SVST_A (O)
~SVST_B
SYS_RDY (O)
SV_RDY (O)
Program selection (I)
STROBE (I)
CK (O)
RST (I)
PRG_
STEP_
CYC_
RUN (I)
UTORUN (O)
[2]
[1]
pprox. 1 sec.
Error has been cleared.
[1] Set ON the RUN signal only after the SV_RDY signal is ON.
[2] Include a sufficient delay time before the program select signal starts between
the program select signal input and STROBE signal input. (200 msec or so)
Note 1: To continue the automatic operation, program selection, PRG_RST,
STEP_RST and CYC_RST are necessary.
Note 2: The servo power may not be turned off with some type of error.
Note 3: Program selection, PRG_RST, STEP_RST and CYC_RST can be
executed at any timing unless the auto operation mode is selected.
STE 71367
– 86 –

 Loading...
Loading...





