ZED-F9P-Integration Manual
UBX-18010802 - R01
1 Overview Page 24 of 64
Objective Specification - Confidential
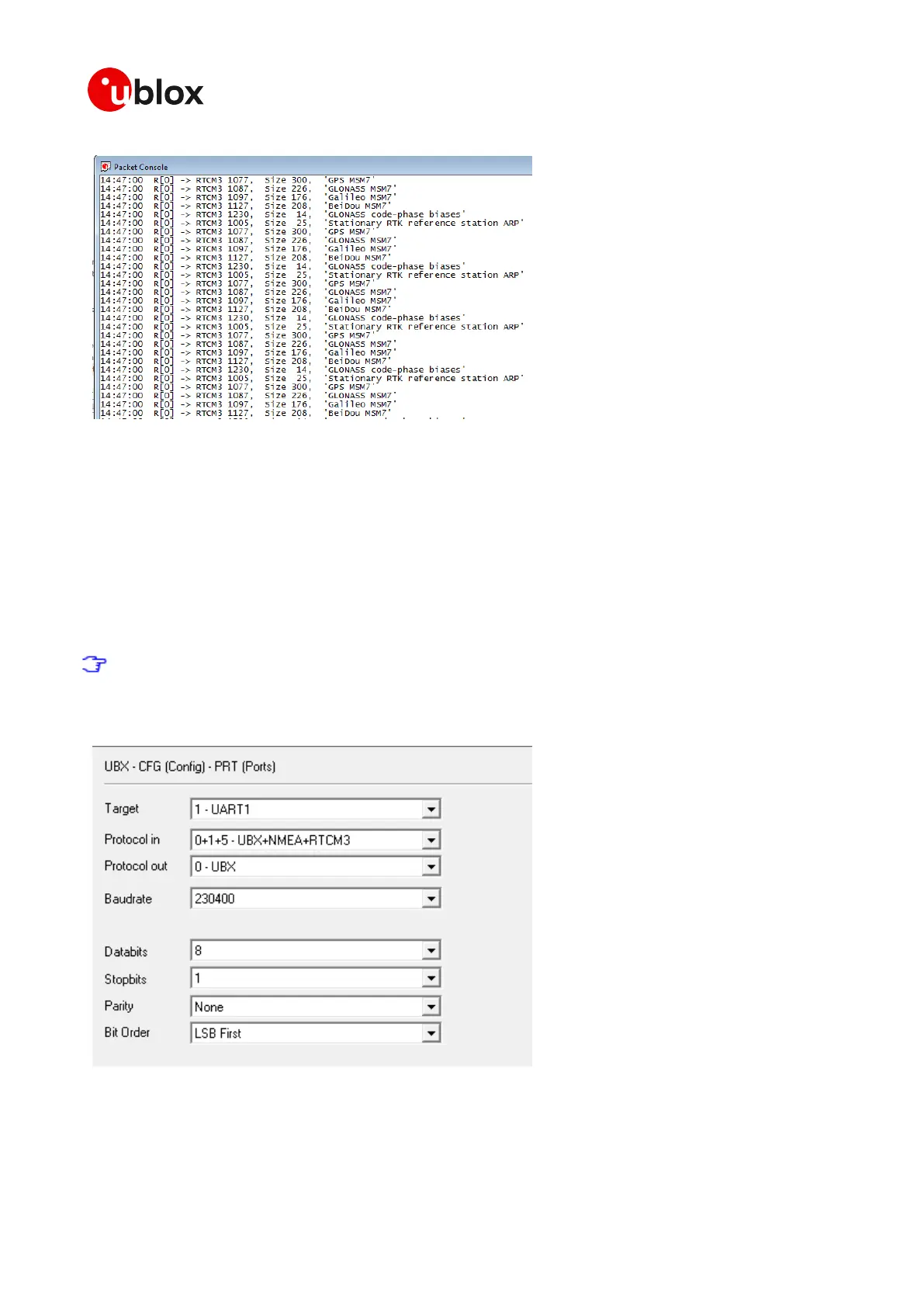
Figure 22: Base u-center packet console RTCM3 view
1.10.2 Rover configuration
For rover operation the following procedure needs to be carried out:
• Set the UART1 interface for the correct Host baud rate and ensure RTCM3 input protocol has
been enabled using UBX-CFG-PRT message. Please see Figure 23
• Ensure the minimum list of RTCM3 input messages are being received continuously by using
the UBX-RXM-RTCM message. Please see Figure 24
• The rover will indicate DGNSS then FLOAT and finally FIXED mode when the required
conditions for RTK have been met. Please see Figure 25
If the correction stream comes from a VRS caster, the VRS caster needs to know the location
of the rover receiver. To do this the rover has to output the NMEA GGA message and this has
to be sent to the VRS Caster. Typically only the NMEA GGA message is needed.
The example below if for RTCM3 and not VRS.
Figure 23: Rover u-center UART1 UBX-CFG-PRT view
 Loading...
Loading...