ZED-F9R-Integration manual
The geofencing feature allows for the configuration of up to four circular areas (geofences) on the
Earth's surface. The receiver will then evaluate for each of these areas whether the current position
lies within the area or not and signal the state via UBX messaging and PIO toggling.
3.3.2 Interface
Geofencing can be configured using the CFG-GEOFENCE-* configuration group. The geofence
evaluation is active whenever there is at least one geofence configured.
The current state of each geofence plus the combined state is output in UBX-NAV-GEOFENCE with
every navigation epoch.
3.3.3 Geofence state evaluation
With every navigation epoch the receiver will evaluate the current solution's position versus the
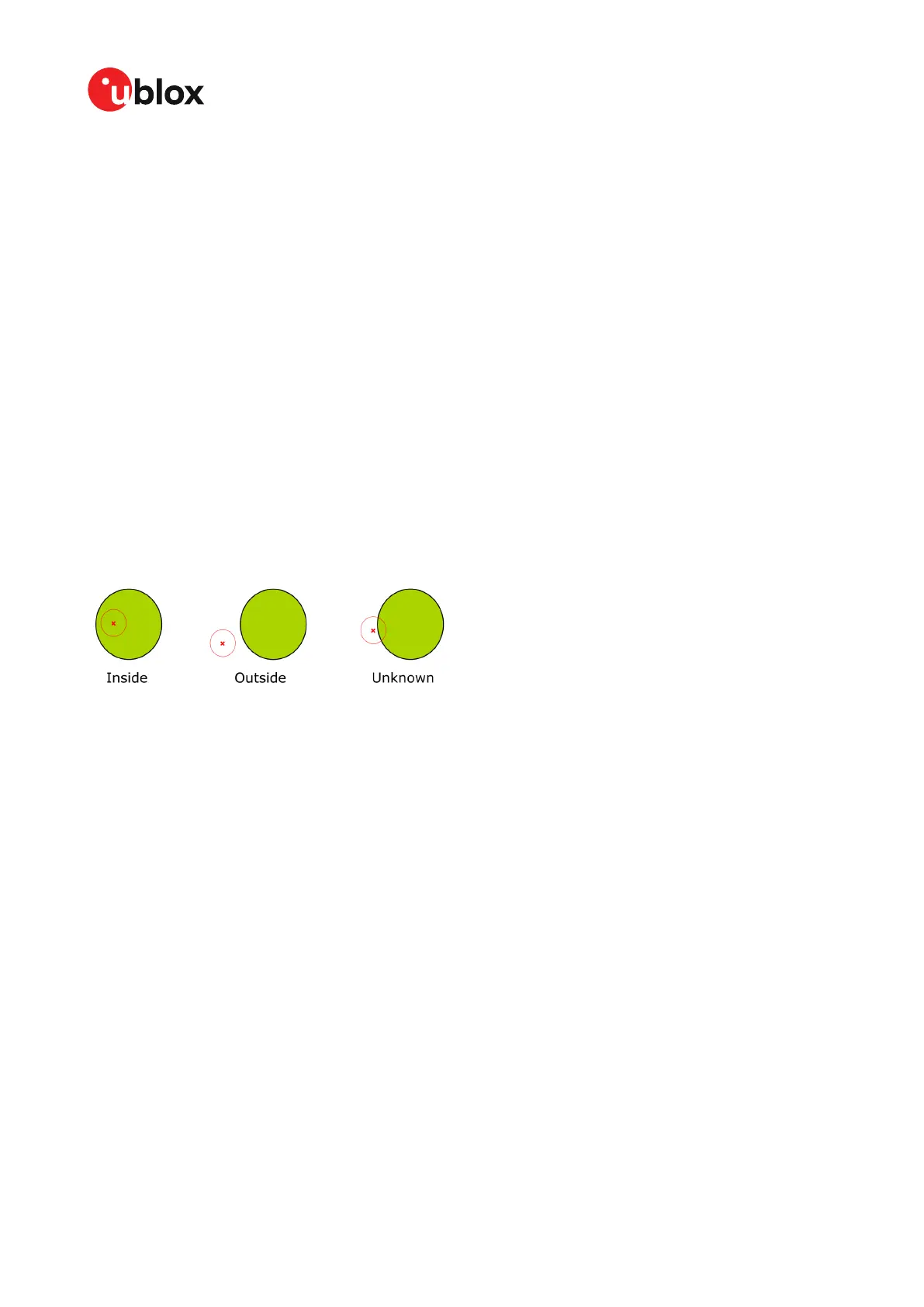
configured geofences. There are three possible outcomes for each geofence:
•
Inside - The position is inside the geofence with the configured confidence level
•
Outside - The position lies outside of the geofence with the configured confidence level
•
Unknown - There is no valid position solution or the position uncertainty does not allow for
unambiguous state evaluation
The position solution uncertainty (standard deviation) is multiplied with the configured confidence
sigma level and taken into account when evaluating the geofence state (red circle in Figure 9).
Figure 9: Geofence states
The combined state for all geofences is evaluated as the combination (Union) of all geofences:
•
Inside - The position lies inside of at least one geofence
•
Outside - The position lies outside of all geofences
•
Unknown - All remaining states
A pin is made available to indicate the status of the geofence. See the GEOFENCE_STAT interface.
3.4 Primary and secondary output
3.4.1 Introduction
u-blox GNSS receivers output various navigation results and data calculated as part of the
navigation solution. These include results such as position, altitude, velocity, status flags, accuracy
estimate figures, satellite/signal information and more.
The ZED-F9R can provide this output in two streams:
• Primary output: Reports the results of a full navigation solution using all capabilities of the
ZED-F9R,
• Secondary output: Reports the results of a GNSS standalone navigation solution.
Both the primary output and secondary output provide a similar set of information but the two
outputs report different results. The primary output is reported in the form of UBX-NAV-* messages,
while the secondary output is reported in the form of UBX-NAV2-* messages. Therefore, the UBX
UBX-20039643 - R06
3 Receiver functionality Page 43 of 119
C1-Public
 Loading...
Loading...

