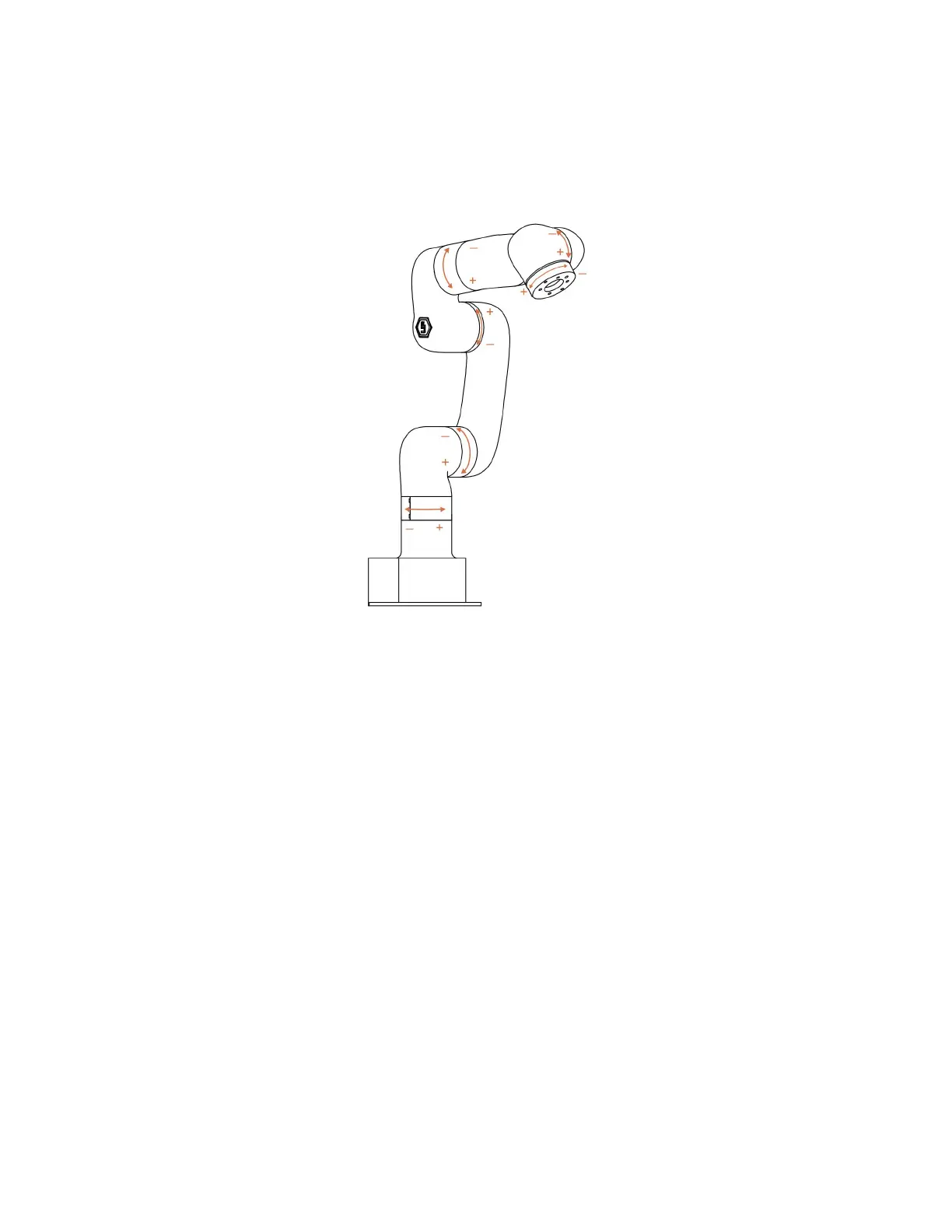
Press-and-hold【+】or【-】for continuous joint motion in a positive or
negative direction, which will stop when the mouse is released.
To confirm the direction of joint rotation, please refer the figure below:
Lite 6
1.5.6 Linear Motion
1.5.6.1 Introduction
Users can control the motion of the robotic arm based on the base
coordinate system and TCP coordinate system. The trajectory of tool
center point in the Cartesian space is a straight line. Each joint
performs a more complex movement to keep the tool in a straight path. The
TCP path is unique once the target point is confirmed, and the
corresponding posture in the execution process is random.
X, Y, and Z control the position of TCP in base or tool coordinate system,
in the unit of mm. While Roll/Pitch/Yaw controls the TCP orientation in
the unit of degree.
Linear motion and arc linear motion belong to the Cartesian space