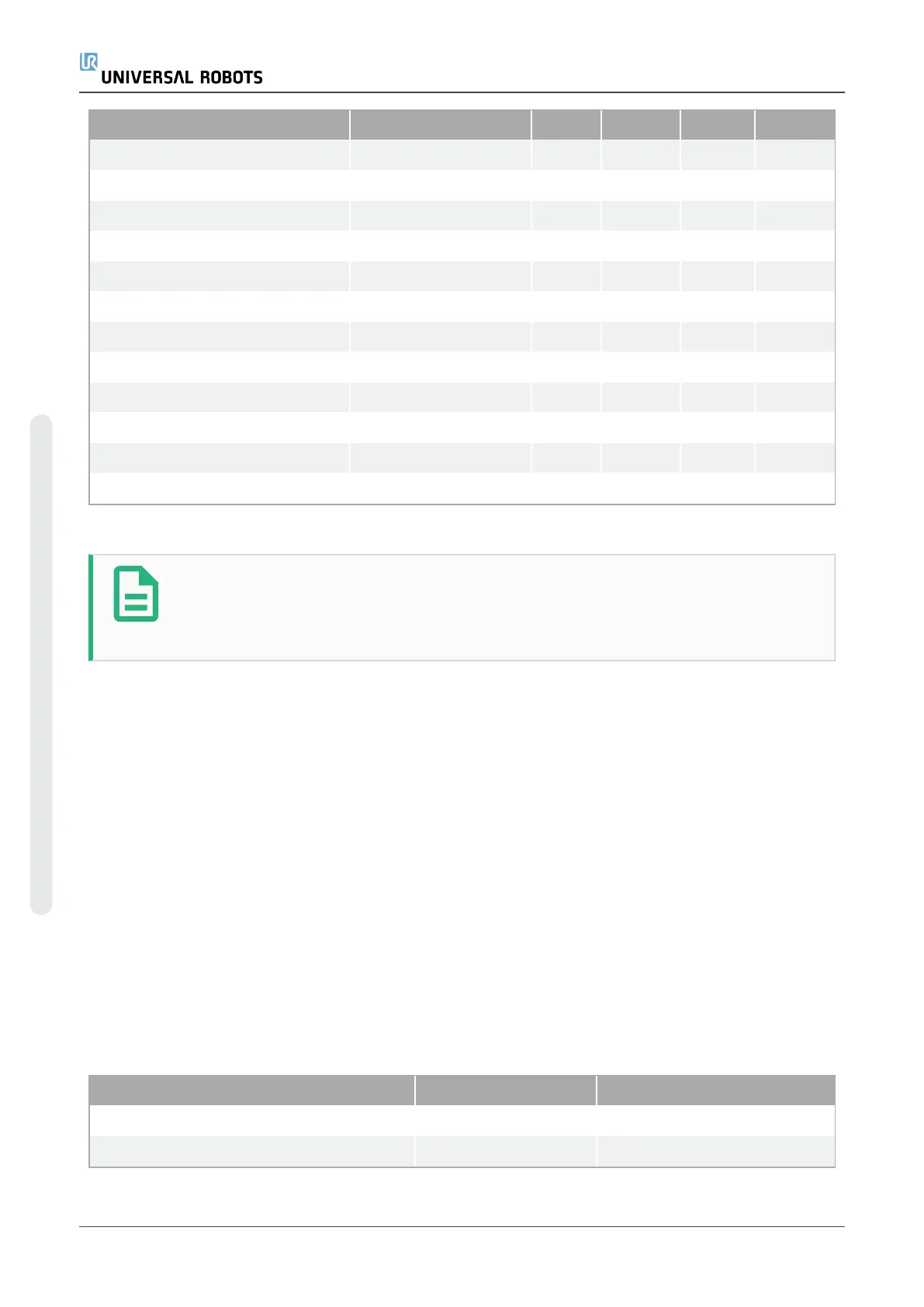
Terminals Parameter Min Typ Max Unit
[COx / DOx]
Current* 0 - 1 A
[COx / DOx]
Voltage drop 0 - 0.5 V
[COx / DOx]
Leakage current 0 - 0.1 mA
[COx / DOx]
Function - PNP - Type
[COx / DOx]
IEC 61131-2 - 1A - Type
Digital Inputs
[EIx/SIx/CIx/DIx]
Voltage -3 - 30 V
[EIx/SIx/CIx/DIx]
OFF region -3 - 5 V
[EIx/SIx/CIx/DIx]
ON region 11 - 30 V
[EIx/SIx/CIx/DIx]
Current (11-30V) 2 - 15 mA
[EIx/SIx/CIx/DIx]
Function - PNP + - Type
[EIx/SIx/CIx/DIx]
IEC 61131-2 - 3 - Type
*For resistive loads or inductive loads of maximum 1H.
NOTE
The word configurable is used for I/O configured as either safety-related I/O or
normal I/O. These are the yellow terminals with black text.
4.4.2. Safety I/O
This section describes dedicated safety input (Yellow terminal with red text) and configurable I/O
(Yellow terminals with black text) when configured as safety I/O. Follow the Common
specifications for all digital I/O in section4.4.1. Common specifications for all digital I/Oon the
previous page.
Safety devices and equipment must be installed according to the safety instructions and the risk
assessment in chapter1.Safetyon page5.
All safety I/O are paired (redundant) and must be kept as two separate branches. A single fault
does not cause loss of the safety function.
There are two permanent safety input types:
•
Robot Emergency Stop for emergency stop equipment only
•
Safeguard Stop for protective devices
The functional difference is shown below.
Emergency Stop Safeguard Stop
Robot stops moving Yes Yes
Program execution Pauses Pauses
UR5e 34 Hardware Manual
4.Electrical Interface
Copyright © 2009–2022 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...













