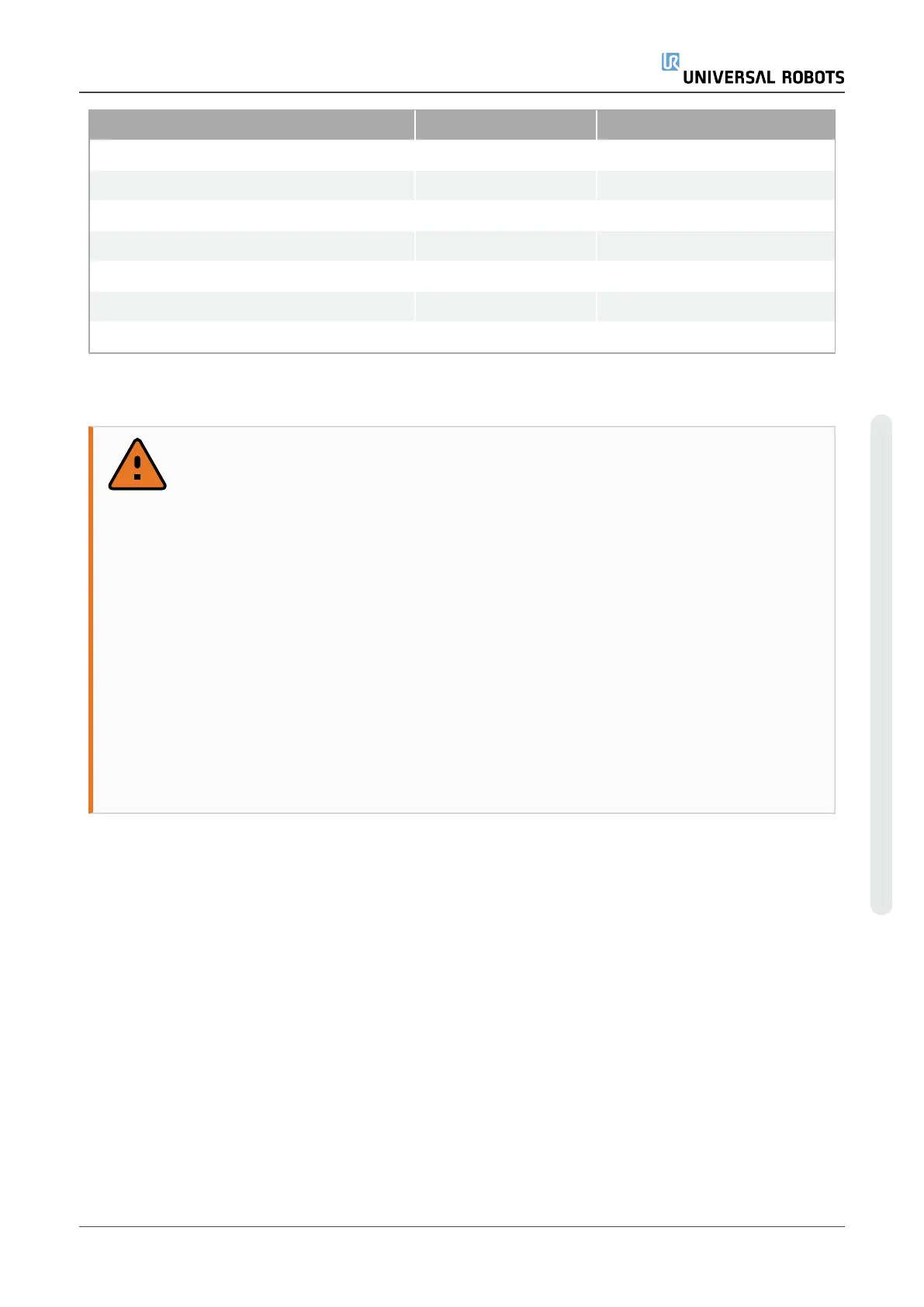
Emergency Stop Safeguard Stop
Drive power Off On
Reset Manual Automatic or manual
Frequency of use Infrequent Every cycle to infrequent
Requires re-initialization Brake release only No
Stop Category (IEC60204-1) 1 2
Performance level of
monitoring function (ISO13849-1) PLd PLd
Use the configurable I/O to set up additional safety I/O functionality, e.g. Emergency Stop Output.
Configuring a set of configurable I/O for safety functions are done through the GUI, (see part).
WARNING
1. Never connect safety signals to a PLC that is not a safety PLC with the
correct safety level. Failure to follow this warning could result in serious
injury or death as the safety functions could be overridden. It is important to
keep safety interface signals separated from the normal I/O interface
signals.
2. All safety-related I/O are constructed redundantly (two independent
channels). Keep the two channels separate so that a single fault cannot lead
to loss of the safety function.
3. Safety functions must be verified before putting the robot into operation.
Safety functions must be tested regularly.
4. The robot installation shall conform to these specifications. Failure to do so
could result in serious injury or death as the safety function could be
overridden.
OSSD Signals
All configured and permanent safety inputs are filtered to allow the use of OSSD safety equipment
with pulse lengths under 3ms. The safety input is sampled every millisecond and the state of the
input is determined by the most frequently seen input signal over the last 7 milliseconds. OSSD
pulses on the safety outputs are detailed in PolyScope.
Default safety configuration
The robot is delivered with a default configuration, which enables operation without any additional
safety equipment (see illustration below).
Hardware Manual 35 UR5e
4.Electrical Interface
Copyright © 2009–2022 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...













