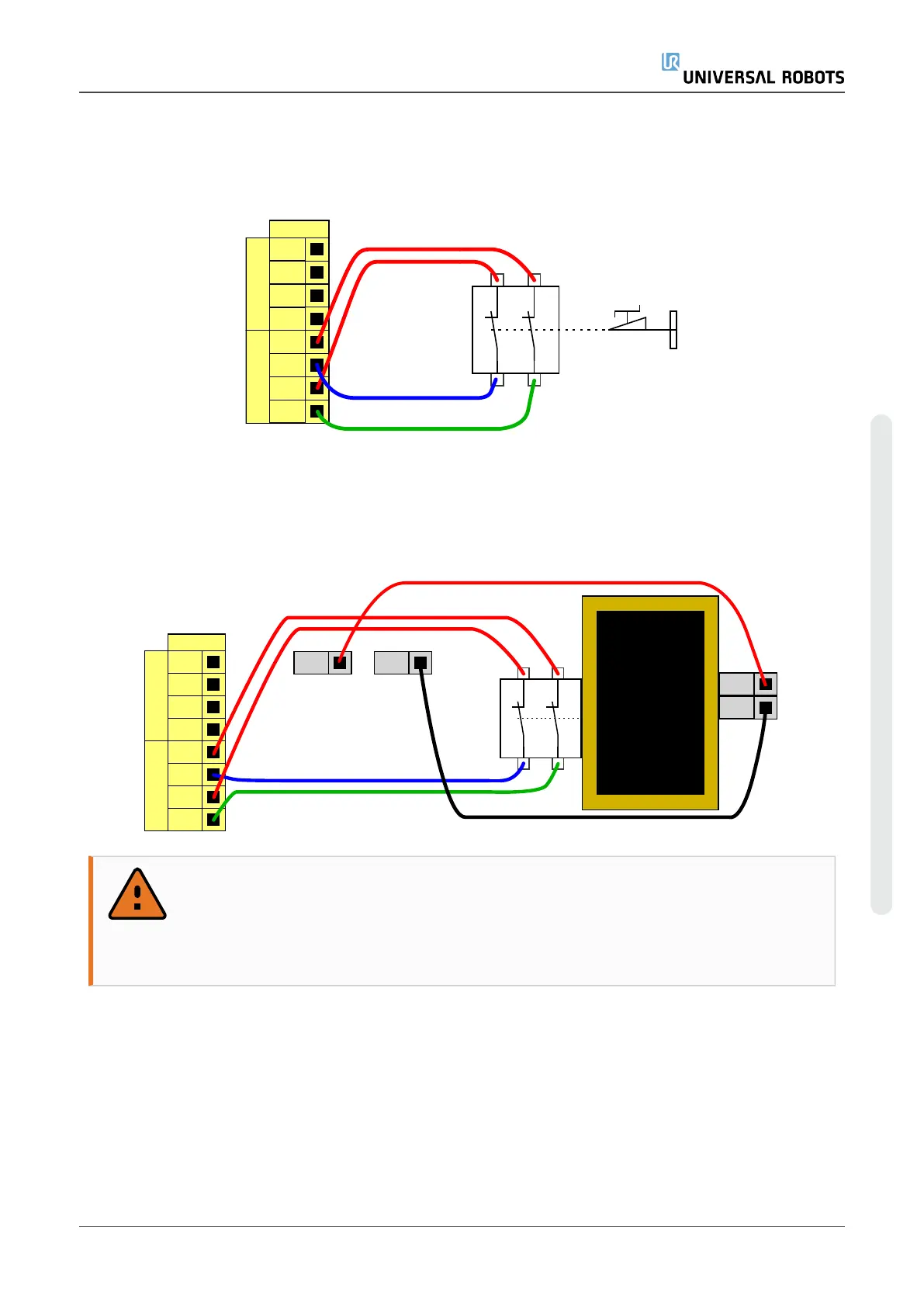
Safeguard stop with automatic resume
An example of a basic safeguard stop device is a door switch where the robot is stopped when a
door is opened (see illustration below).
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
This configuration is only intended for applications where the operator cannot go through the door
and close it behind him. The configurable I/O is used to setup a reset button outside the door to
reactivate robot motion.
Another example where automatic resume is appropriate is when using a safety mat or a safety-
related laser scanner (see below).
24V
EI1
24V
SI0
24V
SI1
24V
EI0
Safety
Safeguard Stop
Emergency Stop
24V 0V
24V
0V
WARNING
1. The robot resumes movement automatically when the signal is re-
established. Do not use this configuration if signal can be re-established
from the inside of the safety perimeter.
Safeguard Stop with reset button
If the safeguard interface is used to interact with a light curtain, a reset outside the safety
perimeter is required. The reset button must be a two channel type. In this example the I/O
configured for reset is CI0-CI1 (see below).
Hardware Manual 37 UR5e
4.Electrical Interface
Copyright © 2009–2022 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...













