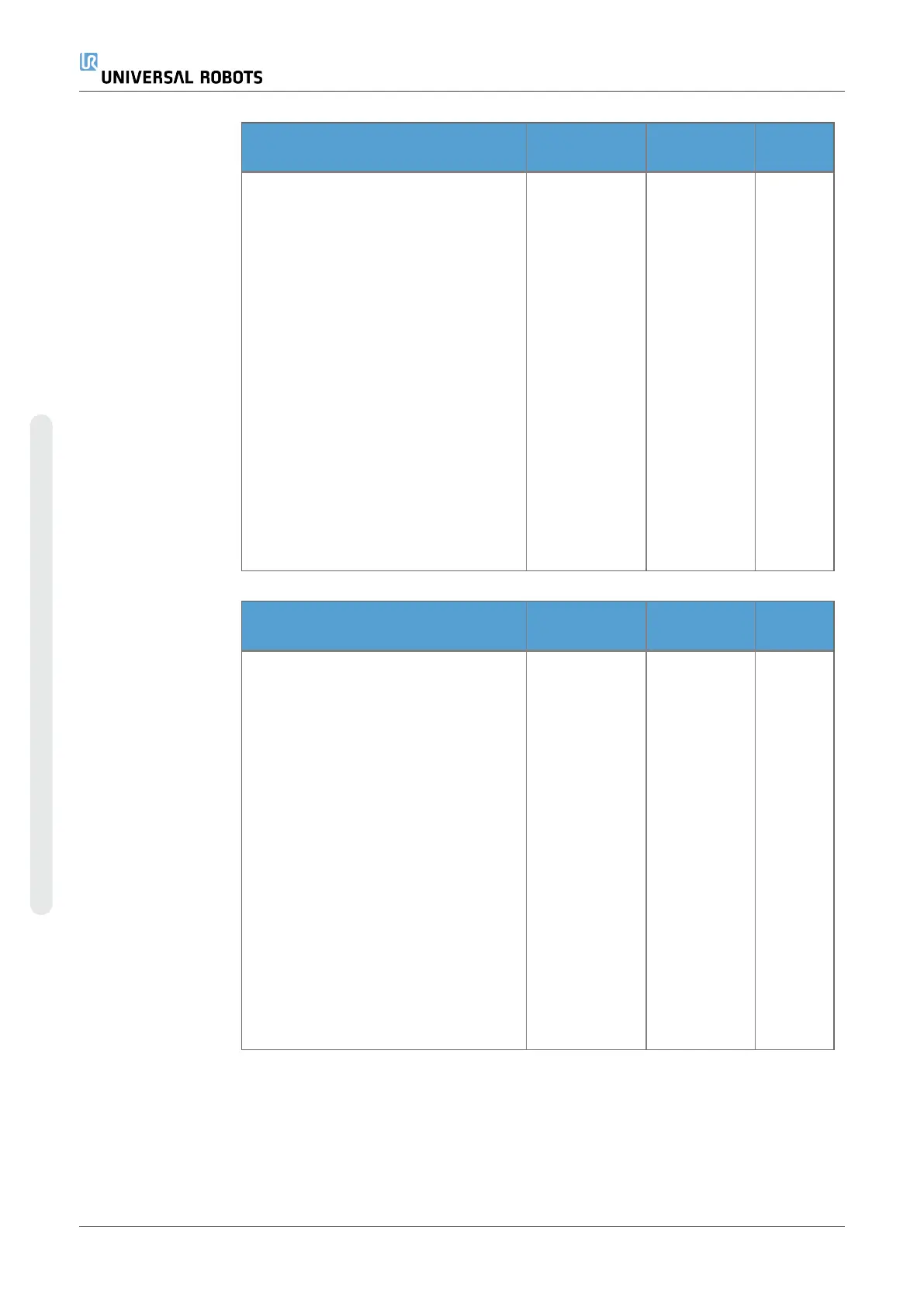
SF15 Stopping
Time Limit
Description
What
happens?
Tolerances
and PFH
D
:
Affects
Real time monitoring of conditions such
that the stopping time limit will not be
exceeded. Robot speed is limited to
ensure that the stop time limit is not
exceeded.
The stopping capability of the robot in
the given motion(s) is continuously
monitored to prevent motions that
would exceed the stopping limit. If the
time needed to stop the robot is at risk
of exceeding the time limit, the speed of
motion is reduced to ensure the limit is
not exceeded. A robot stop will be
initiated to prevent exceeding the limit.
The safety function performs the same
calculation of the stopping time for the
given motion(s) and initiates a cat 0
stop if the stopping time limit will be or
is exceeded.
Will not allow
the actual
stopping time
to exceed the
limit setting.
Causes
decrease in
speed or a
robot stop so
as NOT to
exceed the
limit
TOL: 50 ms
PFH
D
:1.8E-
07
Robot
SF16 Stopping
Distance Limit
Description
What
happens?
Tolerances
and PFH
D
:
Affects
Real time monitoring of conditions such
that the stopping distance limit will not
be exceeded. Robot speed is limited to
ensure that the stop distance limit will
not be exceeded.
The stopping capability of the robot in
the given motion(s) is continuously
monitored to prevent motions that
would exceed the stopping limit. If the
time needed to stop the robot is at risk
of exceeding the time limit, the speed of
motion is reduced to ensure the limit is
not exceeded. A robot stop will be
initiated to prevent exceeding the limit.
The safety function performs the same
calculation of the stopping distance for
the given motion(s) and initiates a cat 0
stop if stopping time limit will be or is
exceeded.
Will not allow
the actual
stopping time
to exceed the
limit setting.
Causes
decrease in
speed or a
robot stop so
as NOT to
exceed the
limit
TOL: 40 mm
PFH
D
:1.8E-
07
Robot
UR10e 106 User Manual
15.Safety Functions Table 1
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










