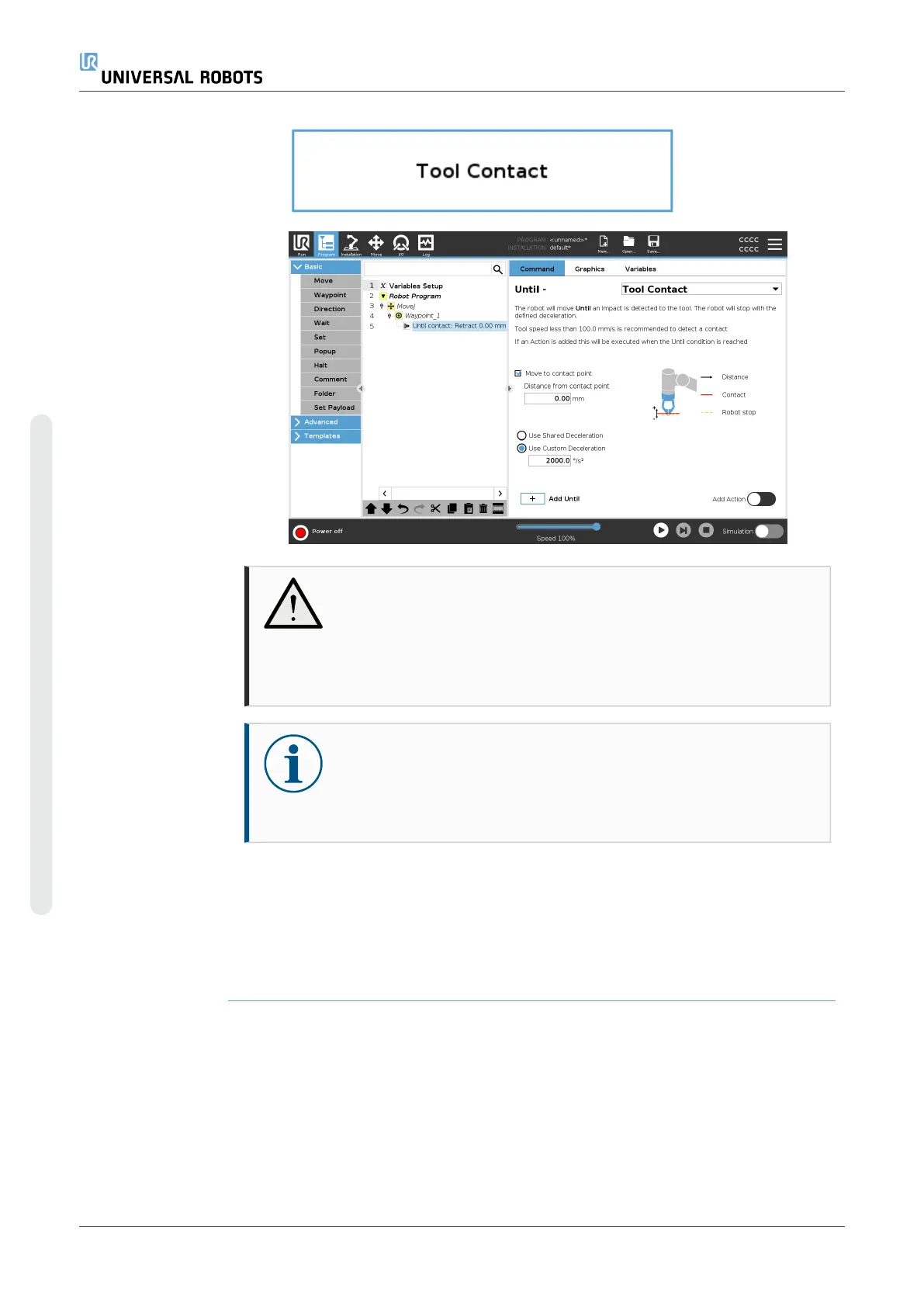
Add a Until tool
contact to a robot
program
1. When you have added the Until command, tap the
CAUTION
The default speed of motion is too high for contact detection. A faster
speed of motion triggers a robot stop, before the Tool Contact
condition can take effect. To avoid triggering a robot stop, lower the
speed of motion. For example: 100m/s.
NOTICE
Until Tool Contact might not work if the mounted tool vibrates. For
example: a vaccuum gripper with an embedded pump can introduce
fast vibrations.
Detail Use the Retract to Contact setting for the robot to return to the initial point of contact.
You can set an additional reverse movement to make the robot move free of, or
toward, contact. This is useful if you have a gripper that needs free space to move, or if
a clamping action is needed.
I/O Input This node uses an I/Oinput to stop a signal controlled motion.
You can also use an I/Oinput to specify a stop condition.
UR10e 220 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










