Creating a
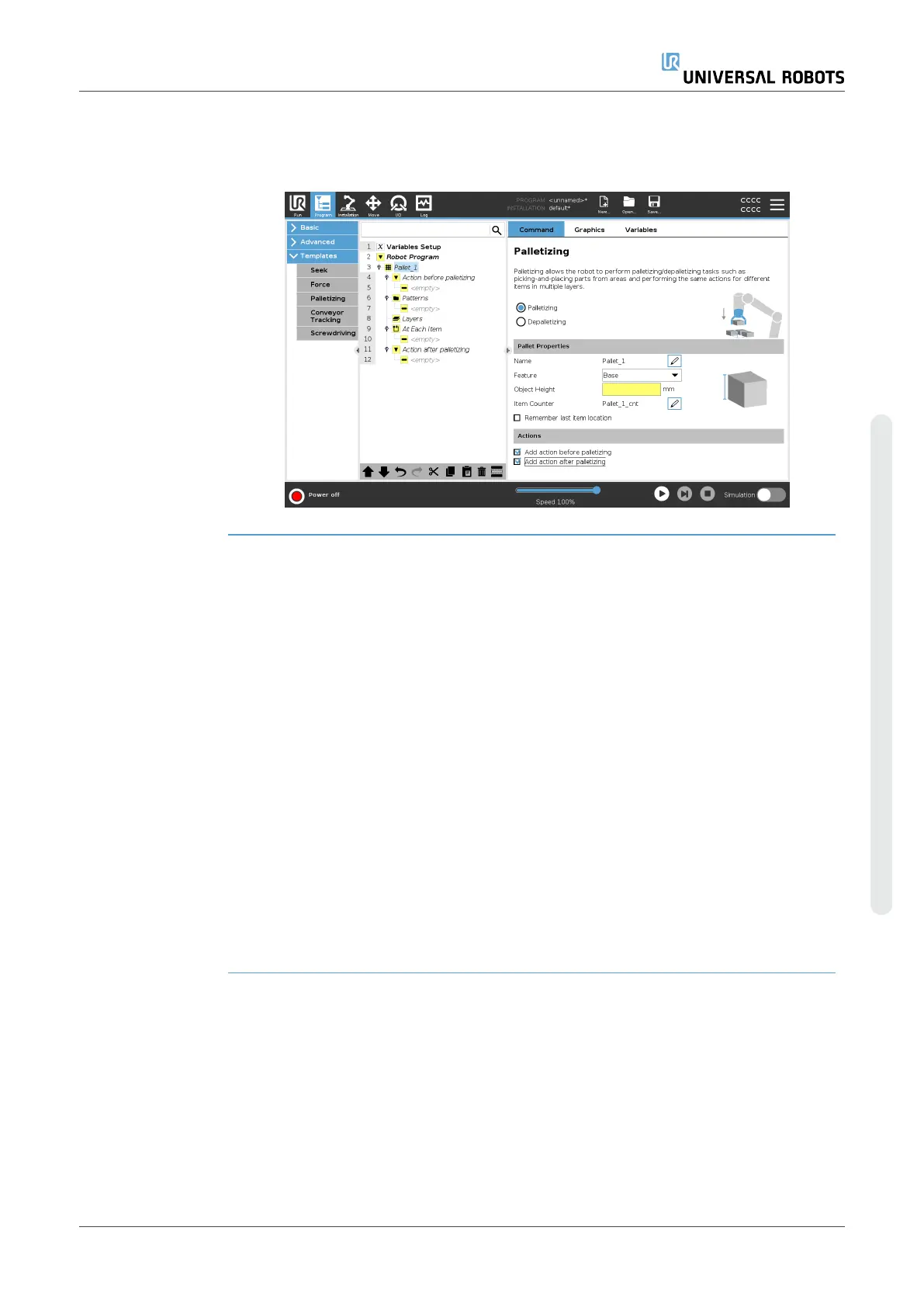
Palletizing
Program
9. In the Program Tree, tap At Each Item node. Choose to use the default option
(A) At Each Item Wizard, or (B) Manually Configure At Each Item. Instructions for
each option are below.
At Each Item
Wizard
The At Each Item Wizard assists in defining the actions performed at each item on a
pallet, such as the ReferencePoint, the Approach Waypoint, ToolActionPoint Waypoint,
and Exit Waypoint (described in the table below). The Approach and Exit Waypoints for
each item remains in the same orientation and direction regardless of the different
items’ orientation.
1. Tap the At Each Item node on the Program Tree.
2. On the At Each Item screen, tap Next.
3. Tap the Move Here button. Then, hold the Auto button or use the Manual button
to move the robot to the ReferencePoint. Tap the Continue button. Tap Next.
4. Tap Set Waypoint to teach the Approach Waypoint (see ). Tap Next.
5. Repeat Step 3.
6. Tap Set Waypoint to teach the Exit Waypoint (see ). Tap Next.
7. Tap Finish.
8. You can now add appropriate gripper action nodes in the Tool Action folder in the
Program Tree.
User Manual 259 UR10e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










