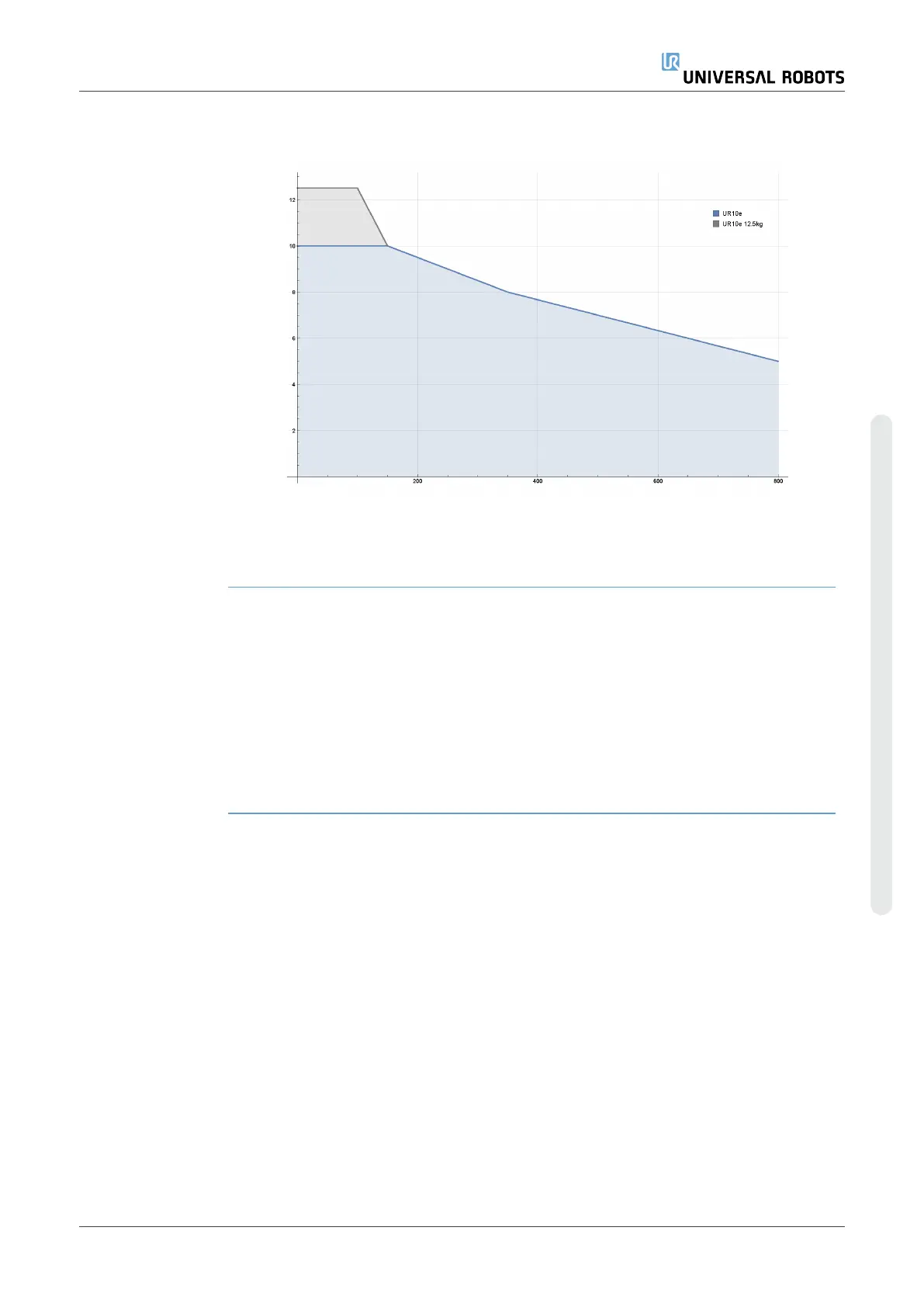
Payload [kg]
Center of gravity offset [mm]
2.3:
The relationship between the rated payload and the center of gravity offset.
Payload Inertia The robot can be used with high inertia payloads. The control software automatically
adjusts accelerations, if you correctly enter the following in PolyScope (see:19.7.10 Set
Payloadon page237 ):
•
Payload mass
•
Center of gravity
•
Inertia
You can use the URSim to evaluate the accelerations and cycle times of the robot
motions with a specific payload.
User Manual 45 UR10e
3.Mechanical Interface
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...










