Appendix S
83
82
There are applications that require moving objects from a common pick location to an
array of placement locations (or vice of versa.) One way to accomplish this would be to
write individual moves to every array position followed by a move to the absolute pick
position. The drawback to this approach is the unwieldy quantity of indexes to write if the
array/matrix pattern is very large. The solution is to use the command which is
specifically designed for pick and place applications.
The except the automatically moves back from
absolute indexes after program x ends.
The pick-and-place within matrix looping
patterns.
JM-x
JM-x command is similar to the JMx JM-x
JM-x is not suitable for any use other than
JM-x Jump to the beginning of program number x, come back for More after program x
ends, and automatically move back from absolute indexes that were in program x
(x= 0 to 4).
Program number x will temporarily be the current program, all commands will be
executed starting from the first one that was previously entered into program x.
The VXM will record motor 1 and 2 absolute indexes while in program x. When
program x ends, the VXM will look ahead to the next incremental index,
combining this index with the return distance of the recorded absolute index of
the same motor. The other motor index recorded will also be moved back it’s
recorded distance.
1. The motor reverse-direction-flags set by "L-x", "LM-2", and "LM-3"
looping commands will be disabled while in program x.
2. Do not use absolute indexes for motors 3 or 4 in program x, use
only incremental indexes for motor 3 or 4.
3. Any absolute indexes encountered on return from program x will
clear all recorded return distances that were saved in program x
Memory usage = 2 bytes
The following examples are based on loops to produce multiple moves. By modifying the
loop values, the number of moves per row and the number of rows can be changed.
Pick and Place Using JM-x*
*NEW COMMAND: available only on VXM firmware versions 1.20 & up
;This Pick and Place example moves one axis
;Placing parts 10x in one row
;The common pick/start location is set to zero absolute
;Output 1 is used to signal an external gripper
;Gripper is used to move parts from Pick to Place location
E
;Program 1 is subroutine to go to pick location
PM-1 ;Select and clear program 1
IA1M0 ;Go to start
U5 ;Output 1 on to activate gripper
P2 ;Pause .2 sec. to let gripper grab part
;Program 0 is main program
PM-0 ;Select and clear program 0
IA1M-0 ;Make this location zero (Start)
U5 ;Output 1 on to activate gripper
P2 ;Pause .2 sec. to let gripper grab part
IA1M1000 ;Move from pick location to place 1
LM0 ;Set loop marker here, loops will branch here
U4 ;Output 1 off to ungrip part
JM-1 ;Jump/return to program 1 to get another part
I1M800 ;Advance to next place location
L10 ;Do from loop marker 10x
U4 ;End with part not gripped
;This Pick and Place example moves one axis
;Placing parts 10x in one row
;The common pick/start location is set to zero absolute
;Output 1 is used to signal an external gripper
;Gripper is used to move parts from Pick to Place location
E
;Program 1 is subroutine to go to pick location
PM-1 ;Select and clear program 1
IA1M0 ;Go to start
U5 ;Output 1 on to activate gripper
P2 ;Pause .2 sec. to let gripper grab part
;Program 0 is main program
PM-0 ;Select and clear program 0
IA1M-0 ;Make this location zero (Start)
U5 ;Output 1 on to activate gripper
P2 ;Pause .2 sec. to let gripper grab part
IA1M1000 ;Move from pick location to place 1
LM0 ;Set loop marker here, loops will branch here
U4 ;Output 1 off to ungrip part
JM-1 ;Jump/return to program 1 to get another part
I1M800 ;Advance to next place location
L10 ;Do from loop marker 10x
U4 ;End with part not gripped
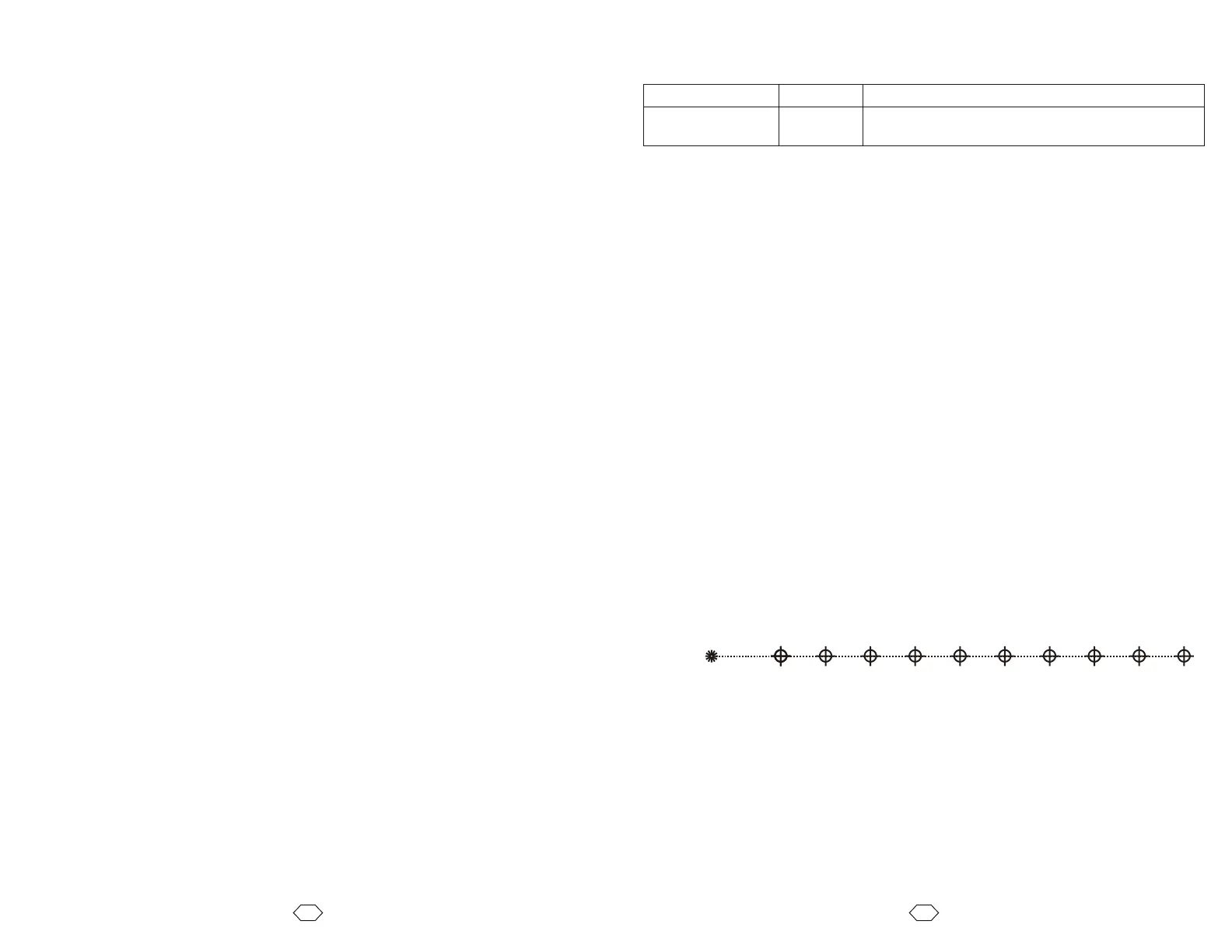
Example #12
Motors run
Function
Pick and Place
Pick from common point and place
in row
1
(Pick)
start/end
®
¬
1 2 3 4 5 6 7 8 9 10
U4 U4 U4 U4 U4 U4 U4 U4 U4 U4
U5
0 1000 8200
Position