27
stops in deceleration mode.
(2) Stop mode in case of over travel
The overtravel prevention function of servo unit refers to the safety function that the servo motor is forced to stop
by inputting the signal of limit switch when the movable part of the machine exceeds the designed safe moving
range.
◼ Related parameter
Forward run
prohibition /P-OT
Reverse run
prohibition /N-OT
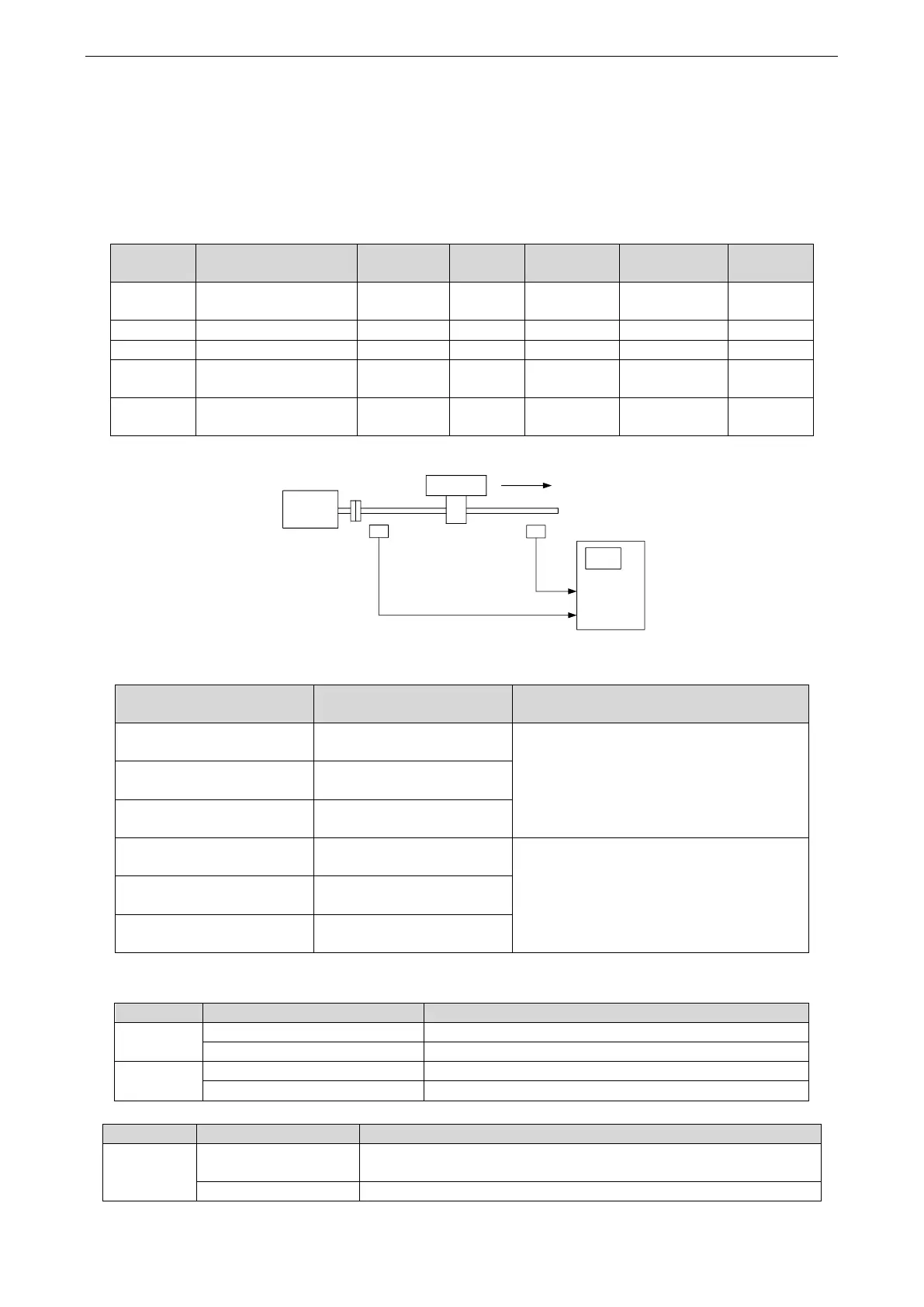
Be sure to connect the limit switch as shown in the figure below.
CN2
SI3
SI4
Servo
motor
Limit
switch
Limit
switch
POT
NOT
Motor forward
direction
Servo unit
Rotary applications such as round tables and conveyors do not need the function of overrun prevention. At this
time, there is no need to connect the overrun prevention with input signals.
Signal /POT, terminal input
status
Overtravel signal (/POT, /NOT) terminal
logic
No need to connect
external input
SI□ terminal has no signal
input
SI□ terminal has signal
input
No need to connect
external input
SI□ terminal has signal
input
SI□ terminal has no signal
input
Parameter settings in forward limit signal /POT and reverse limit signal /NOT can not be set to the same terminal
input at the same time.
POT, set the servo overrun stop mode as P0-28
NOT, set the servo overrun stop mode as P0-28
The deceleration stops 1, the overrun direction moment is 0 after
stopping, and receiving instructions.
Inertia stops, after stopping, overrun direction moment is 0,
 Loading...
Loading...

