Note:
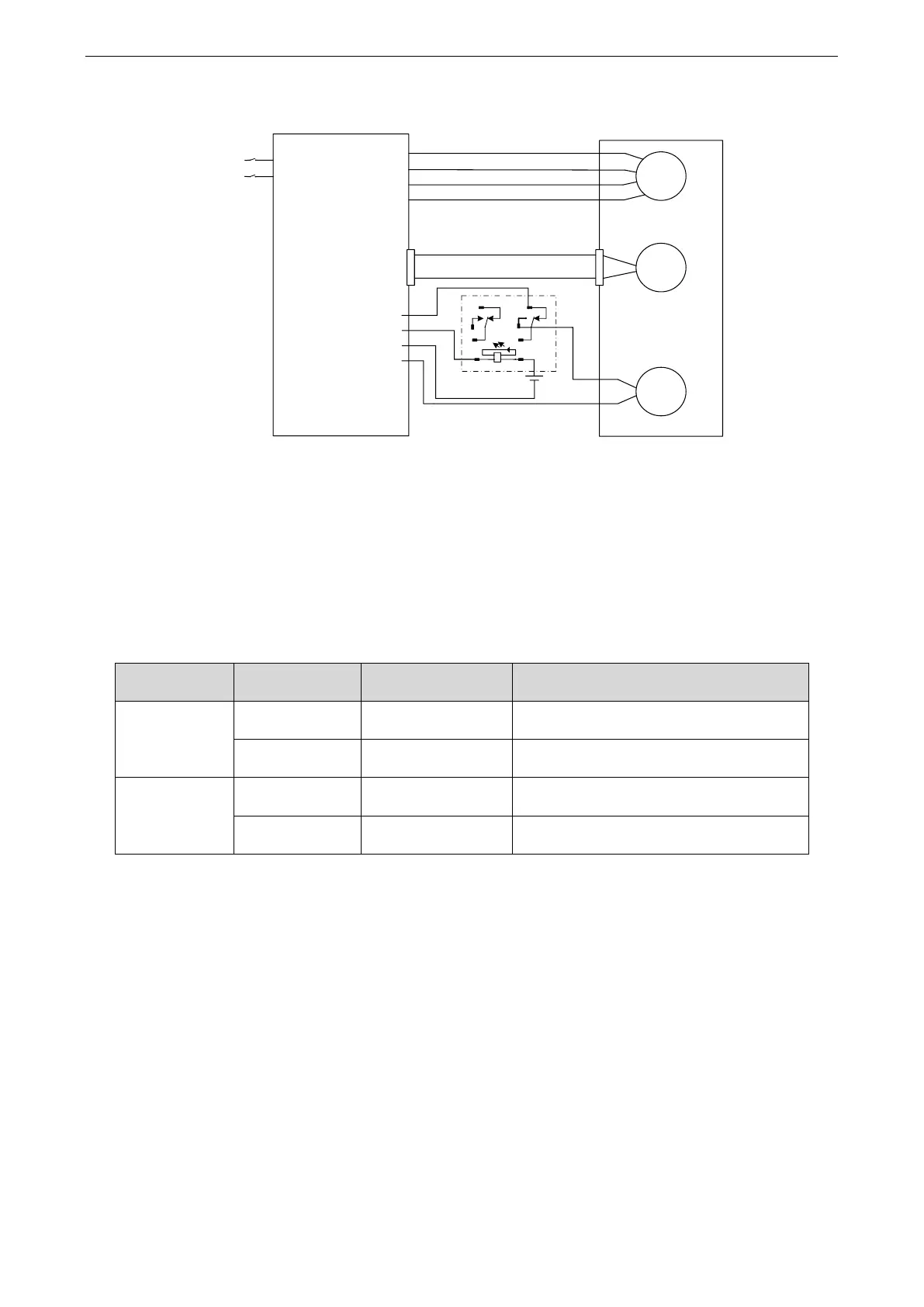
(1) The excitation voltage of the power-off brake is 24V.
(2) If the holding brake current is more than 50mA, please transfer it through the relay to prevent terminal
burnt out due to excessive current.
(2) Software parameter settings
For the servo motor with holding brake, it is necessary to configure one SO terminal of servo driver as holding
brake output /BK function, and determine the effective logic of SO terminal, that is, parameter P5-44 needs to be
set.
Note:
(1) When SO terminal is used to control holding brake, when servo enable is on, holding brake power is on and
motor is in rotatable state;
(2) If the motor fails to rotate during the debugging of the new machine, please confirm whether the holding brake
is open.
(3) Time sequence of holding brake control
① Holding brake sequence in normal state
Due to the action delay time of the brake, the machine moves slightly under the action of gravity. Use P5-07
parameter to adjust the time, so that the holding brake can be opened or closed in advance.
When setting the servo motor with brake, the output signal "/ BK" of control brake and the time of servo SON
signal on/off action are shown in the figure below. That is to say, before the /BK signal outputting and brake is
opened, the servo motor has entered the power on enabling state; after the / BK not outputting and brake is locked,
the servo motor will turn off the power on state.
 Loading...
Loading...

