positioning completion and positioning
approach signal are all effective.
4. When the servo enable is off during
a certain section of operation, the
motor stops according to the servo off
shutdown mode. After the shutdown,
the positioning is invalid.
5. The adjustment time is not valid in
this mode.
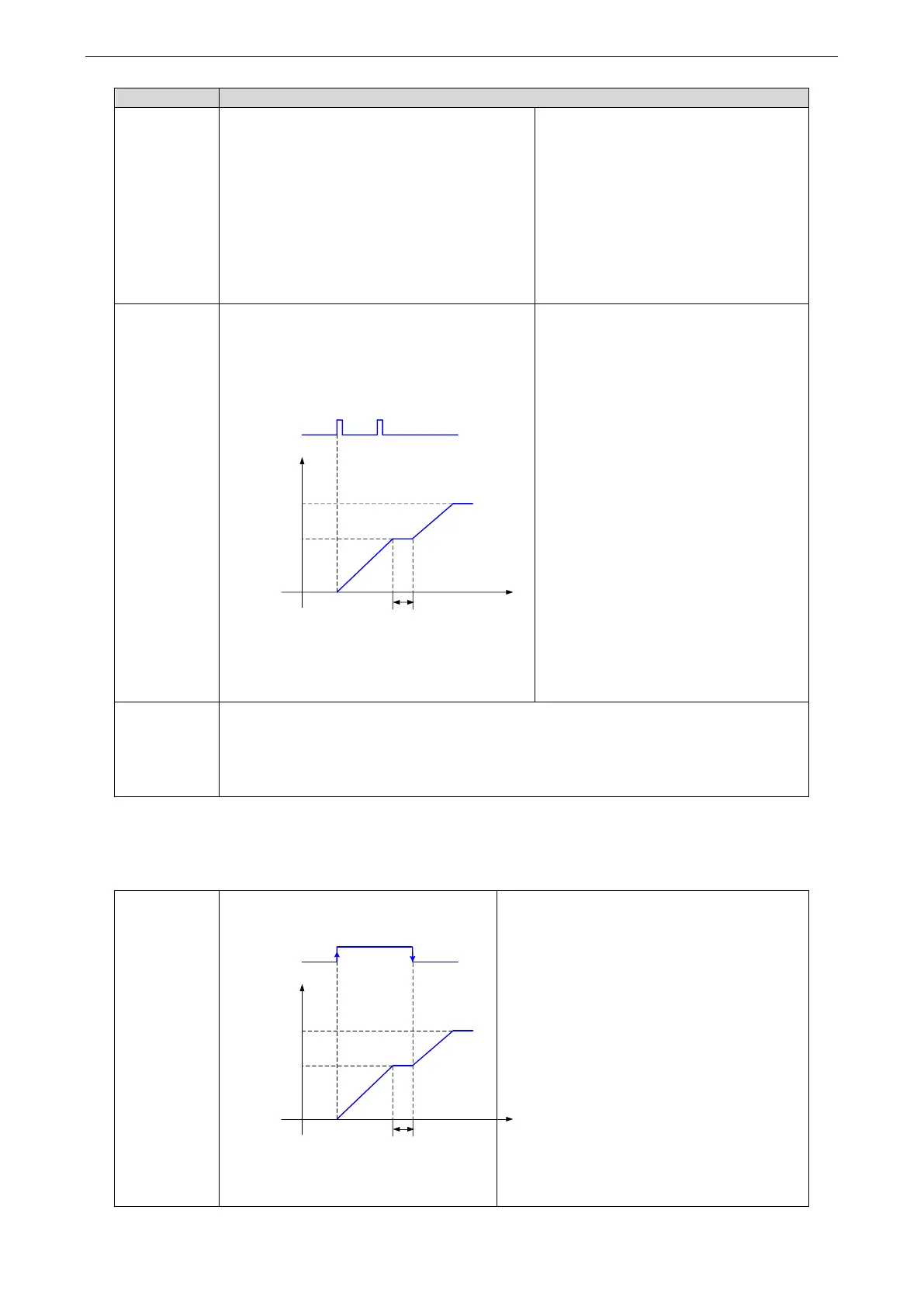
2: Start at the
rising edge
of the signal,
sequential
run all, not
recycling
P
/CHGSTP
Signal status
ON
OFF
t1
t
Take setting two segments as an
example, t1 = p4-16 in the figure.
1. The /CHGSTP signal before the
completion of a cycle will not be
counted, as shown in the second
/CHGSTP signal in the figure.
2. In this mode, the step change signal
/CHGSTP is triggered by rising edge.
3. After each operation completion,
positioning completion and positioning
approach signal are all effective.
4. When the servo enable is off during
a certain section of operation, the
motor stops according to the servo off
shutdown mode. After the shutdown,
the positioning is invalid.
5. The adjustment time is valid in this
mode.
3: set
segment no.
through
communicati
on
Servo is ON, set parameter P2-09=0, then set the running segment. The motor will run
the setting segment. Refer to chapter 4.4.8.
4: /CHGSTP
double edge
triggering
P
/CHGSTP
Signal status
ON
OFF
t1
t
t1 = p4-16 in the figure.
1. /CHGSTP rising edge triggers the first
segment and falling edge triggers the second
segment. Where, if the first segment position
is required to operate completely, the
/CHGSTP signal remains on until the end of
the first segment.
2. Only in this mode, the number of p4-04
valid segments is invalid.
3. After each operation completion,
positioning completion and positioning
approach signal are all effective.
4. When the servo enable is off during a
certain section of operation, the motor stops
 Loading...
Loading...

