75
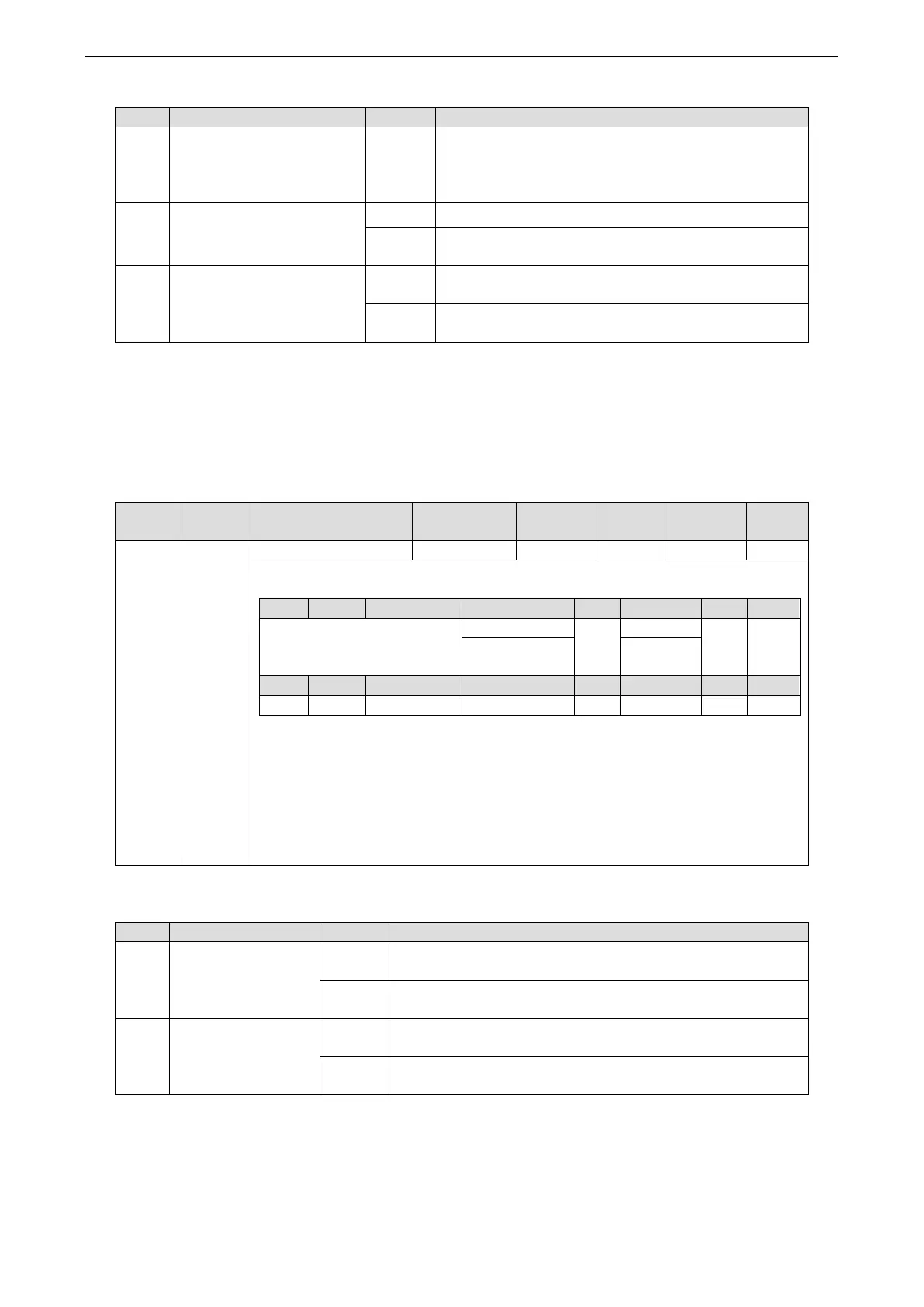
Bit4-6 (operation mode specific):
Trigger the positioning action start and setting value
update.
Get a new position decision task (607Ah (Target
position), 6081h (Profile velocity)
Complete the currently running positioning action.
Interrupt the current positioning action and start the
downward positioning action immediately
607Ah (Target position) is processed as absolute
position.
607Ah (Target position) is processed as relative
position.
Please do not change the acceleration and deceleration (*) during motor operation.
If you change the acceleration and deceleration, please change bit4 (new set point) from 0 - > 1 after the motor
stops.
6083h (Profile acceleration)
6084h (Profile deceleration)
60C5h (Max acceleration)
60C6h (Max deceleration)
3. Status word (6041h) <PP control mode function>
Indicates the servo driver status.
Bit information
r = reserved (Not corresponding) w = warning
sod = switch on disabled
oms = operation mode specific qs = quick stop
(control mode based on bit) ve = voltage enabled
ila = internal limit active f = fault
oe = operation enabled
rm = remote so = switched on
rtso = ready to switch on
bit12, 10 (operation mode specific):
halt=0 (normal): positioning not completed
halt=1 (stop as halt): axis is decelerating
halt=0 (normal): positioning completed
halt=1 (stop as halt): axis stop (axis speed is 0)
new-setpoint is 0 and the buffer is empty after executing the
action of the current target position
The new location task data is put into the buffer. The buffer
is not empty
 Loading...
Loading...

