85
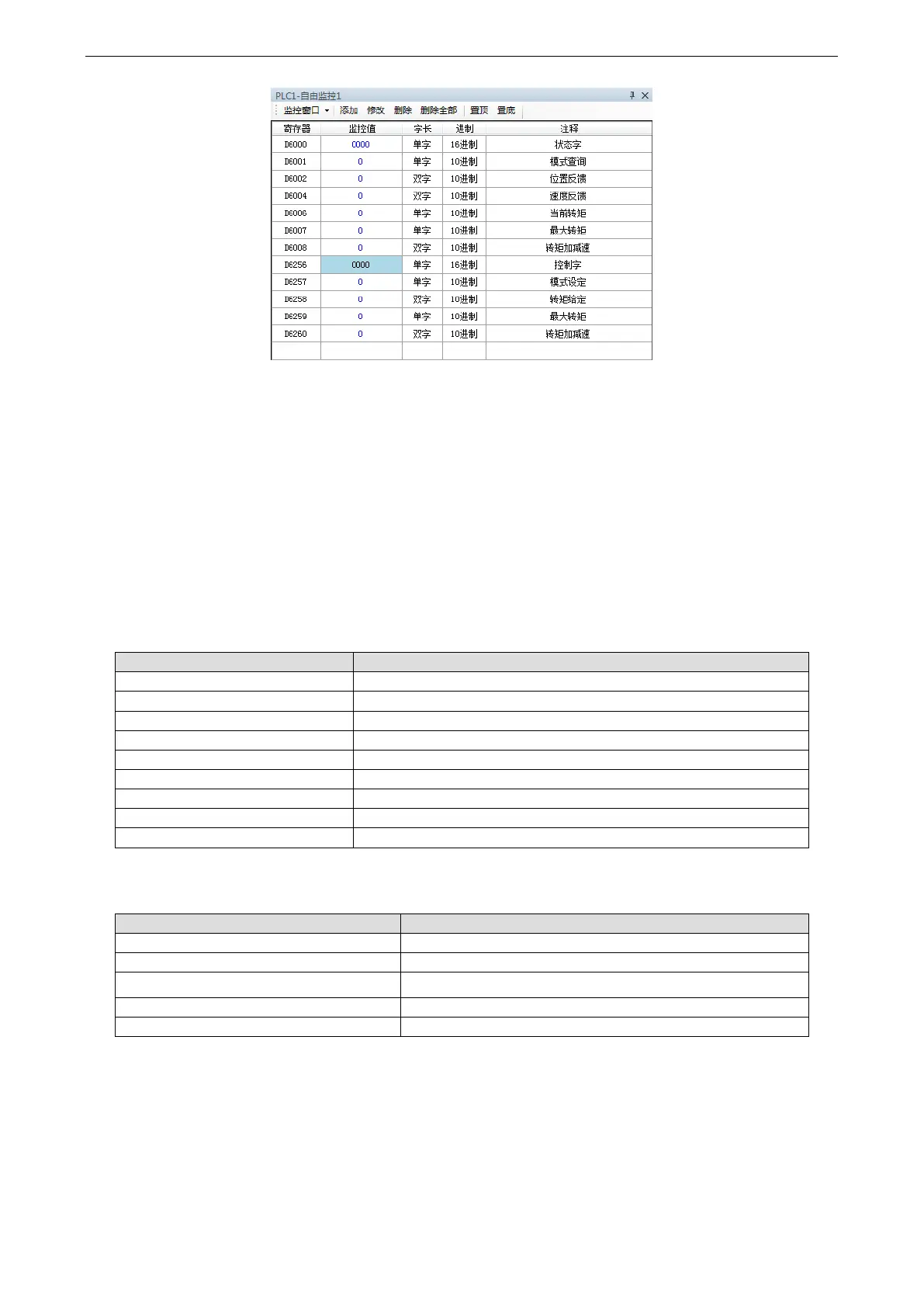
③ First, set P0-00 to 1 to start CiA402 motion control function, then modify D6257 (6060h is 4) to TQ mode.
After setting torque and torque slope parameters through D6258 (6071h), modify D6256 (control word 6040h is
0x06→0x07→0x0F) to enable the slave station, start to run in speed mode. Other parameters are monitored
through D6000-D6008.
4.6.3.4 HM mode
HM mode (i.e. return to origin mode) is a position control mode that specifies various action speeds, generates
position instructions in the servo driver, and executes return to zero action. In this mode, external signals (POT,
NOT, SPD-D) must be used together.
1. Related parameters
HM control mode related object (command・setting type)
 Loading...
Loading...

