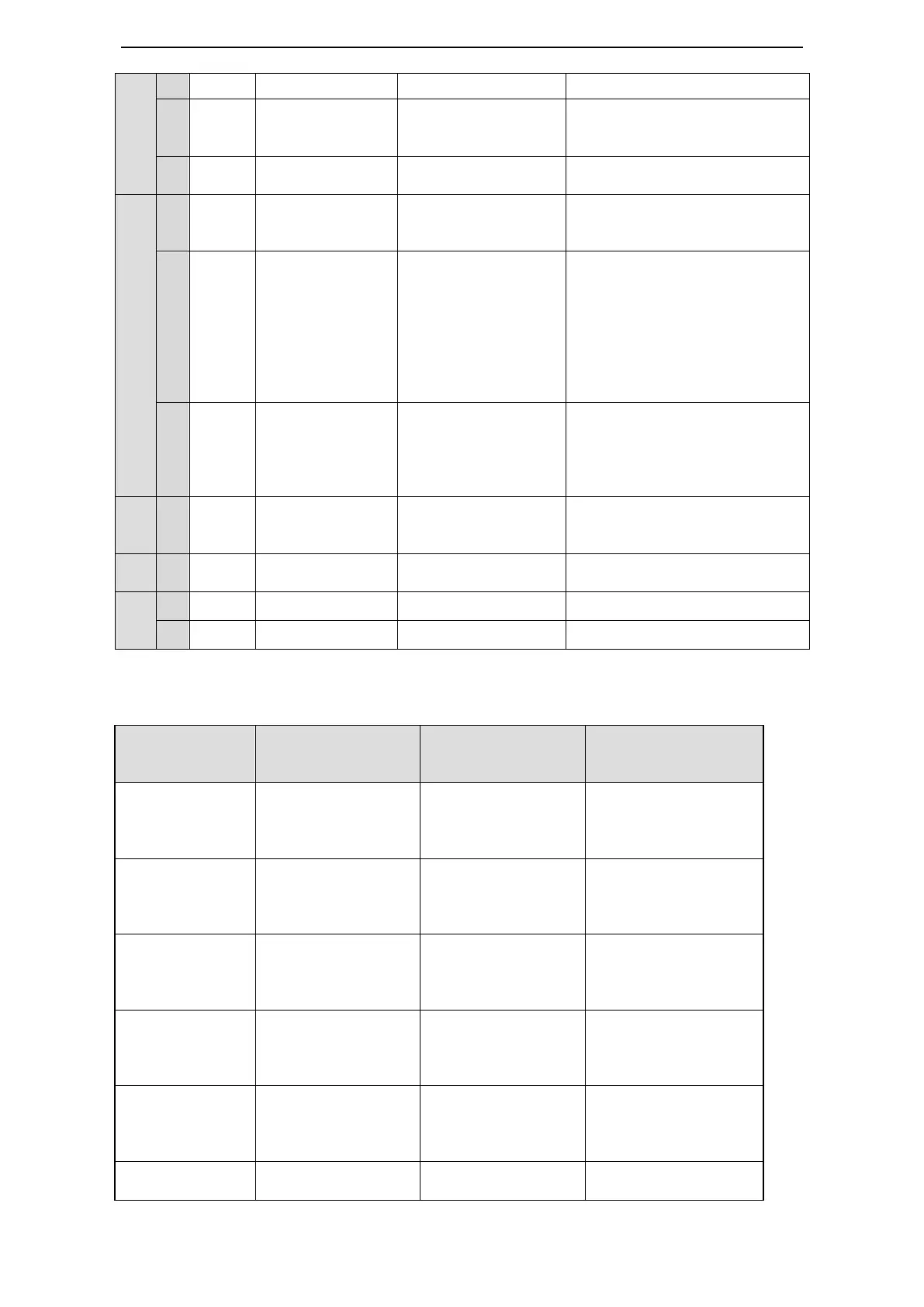
Absolute encoder
data visit alarm
Encoder problem, or
power supply is not
stable
Unplug the encoder cable without
battery will alarm
Absolute encoder
overspeed
Large change of
encoder data
Unplug the encoder cable without
battery will alarm
Check the over range
signal and the over
range mode is alarm
If it no need to alarm after over
range, user can change the over
range signal mode
Over range signal
connection error
1. motor run forward
and encounter the
reverse over range
signal
2. motor run reverse
and encounter the
forward over range
signal
Check the over range connection
and over range terminal
distribution
2. stop overtime too
short
3. brake torque too
small
1. decrease the inertia or use
motor with brake
2. increase stop overtime P0-30
3. increase brake torque P3-32
Motor vibration too
serious
Decrease servo position loop or
speed loop gain, check the motor
shaft connection
Motion bus lose
synchronization
Motion bus
communication error
Check the motion bus connection
Set the correct motor code
The following table is regenerative resistor specification of each drive:
External regenerative
resistor
External regenerative
resistor
DS3E-20P2-PFA
DS3L-20P2-PFA
DS3-20P2-PTA
DS3E-20P4-PFA
DS3L-20P4-PFA
DS3-20P4-PTA
DS3E-20P7-PFA
DS3L-20P7-PFA
DS3-20P7-PTA
DS3E-21P5-PFA
DS3L-21P5-PFA
DS3-21P5-PTA
DS3E-22P3-PFA
DS3L-22P3-PFA
DS3-22P3-PTA
 Loading...
Loading...



