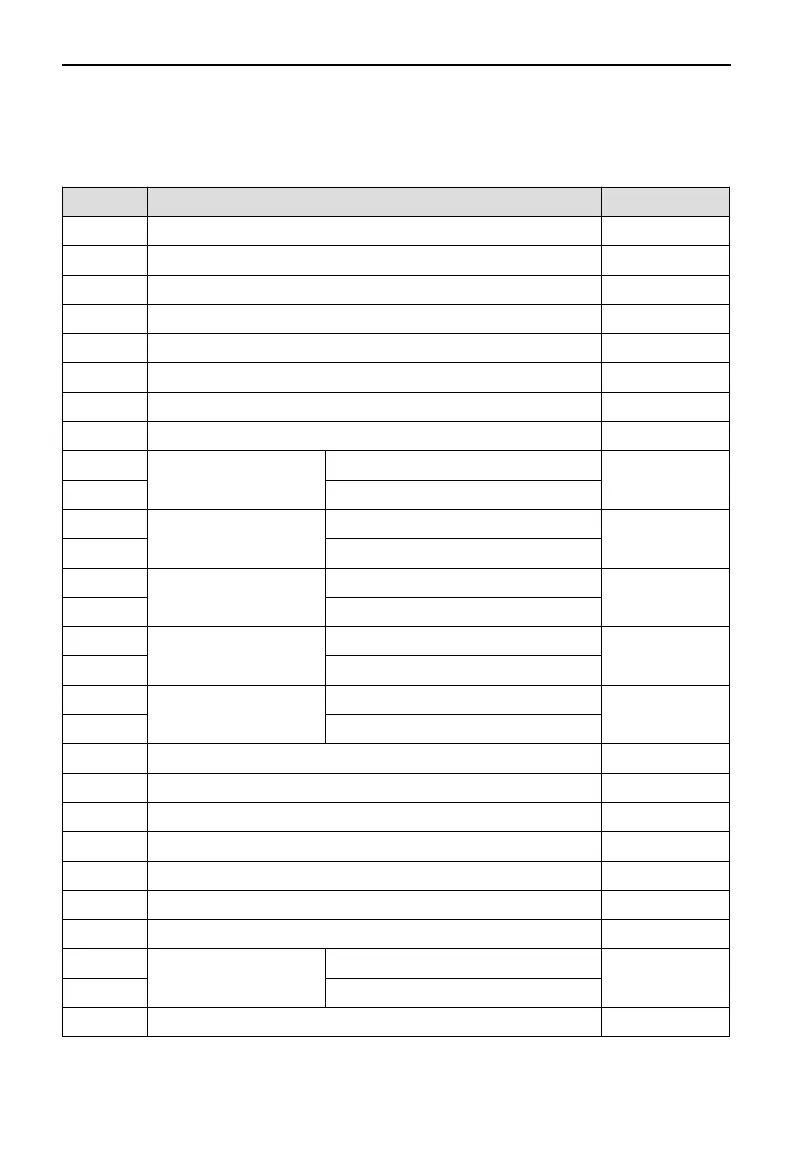
7-2.Monitoring status parameters
U0-XX:
Code Content Unit
U0-00 servo motor speed Rpm
U0-01 Input speed instruction Rpm
U0-02 Torque instruction % rated
U0-03 Mechanical angle 1°
U0-04 Electric angle 1°
U0-05 Bus voltage V
U0-06 IPM temperature 0.1℃
U0-07 Torque feedback % rated
U0-08
pulse offset
(0000~9999)*1
Instruction pulse
U0-09
(0000~9999)*10000
U0-10
Encoder feedback
(0000~9999)*1
Encoder pulse
U0-11
(0000~65535)*10000
U0-12
input instruction pulse
numbers
(0000~9999)*1
Instruction pulse
U0-13
(0000~9999)*10000
U0-14
position feedback
(0000~9999)*1
Instruction pulse
U0-15
(0000~9999)*10000
U0-16
encoder accumulated
position
(0000~9999)*1
Encoder pulse
U0-17
(0000~9999)*10000
U0-18 Torque current 0.01A
U0-19 Analog input V-REF value 0.001V
U0-20 Analog input T-REF value 0.001V
U0-21 Input signal status 1
U0-22 Input signal status 2
U0-23 output signal status 1
U0-24 ouput signal status 2
U0-25
Input pulse frequency
(0000~9999)*1
Hz
U0-26
(0000~9999)*10000
U0-41 Instantaneous output power 1W
112
 Loading...
Loading...

