F1-XX
Function code Explanation
F1-00 Jog run
F1-01 Test run
F1-02 Current Sampling Zero-correction
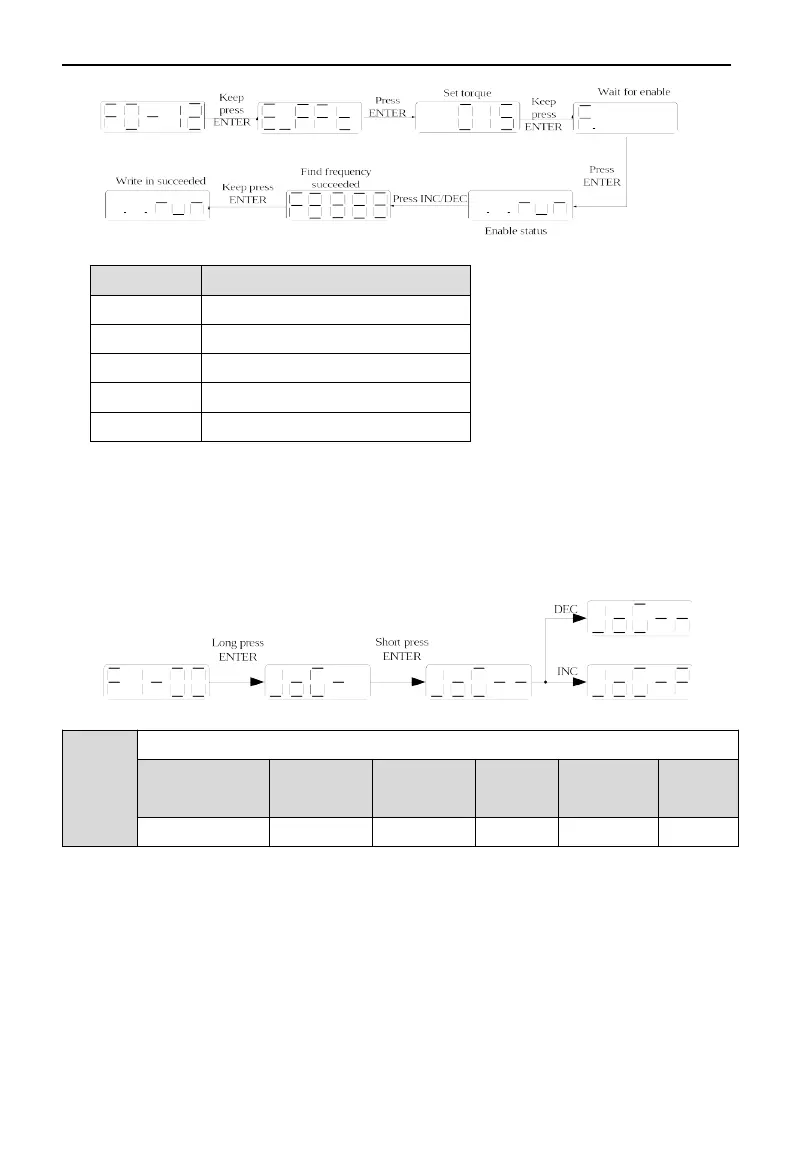
F1-05 Forced enable
F1-06 Reset turns of absolute encoder
1. Jog operation(F1-00)
Before entering inching mode, please confirm that the motor shaft is not connected to the machine and the
driver is BB idle!
During inching operation, parameters such as gain will participate in the control, and whether the parameter
setting is appropriate can be judged according to the operation condition.
P3-18 JOG speed
Unit Default
setting
Setting range Suitable
mode
Modify Effective
1rpm 100 0~1000 JOG Servo OFF At once
2. Test run(F1-01)
Before entering the test run mode, please confirm that the motor shaft is not connected to the machine!
When the servo driver is connected to the non-original encoder or power cable, it should first enter the test run
mode to verify that the encoder terminal or power terminal is connected correctly.
Test run mainly checks the power cable and the encoder feedback cable to determine whether the connection is
normal. According to the following operation, the motor can normally achieve forward and reverse rotation. If
the motor shaft shakes or driver alarms, please immediately disconnect the power supply, and re-check the
52
 Loading...
Loading...

