(c2) Z phase number (P9-11.0) is 0 and mechanical offset (P9-19, P9-20) is not 0:
In the process of positive acceleration or positive constant speed operation, stop the machine
immediately after encountering the rising edge of the deceleration point (origin) signal. After the motor
is completely stopped, the motor will move a quantitative pulse (P9-19, P9-20) at the speed set by
P9-12 (homing high speed) according to the set number and direction of mechanical offset pulses
(either positive direction or negative direction), then the motor stops.
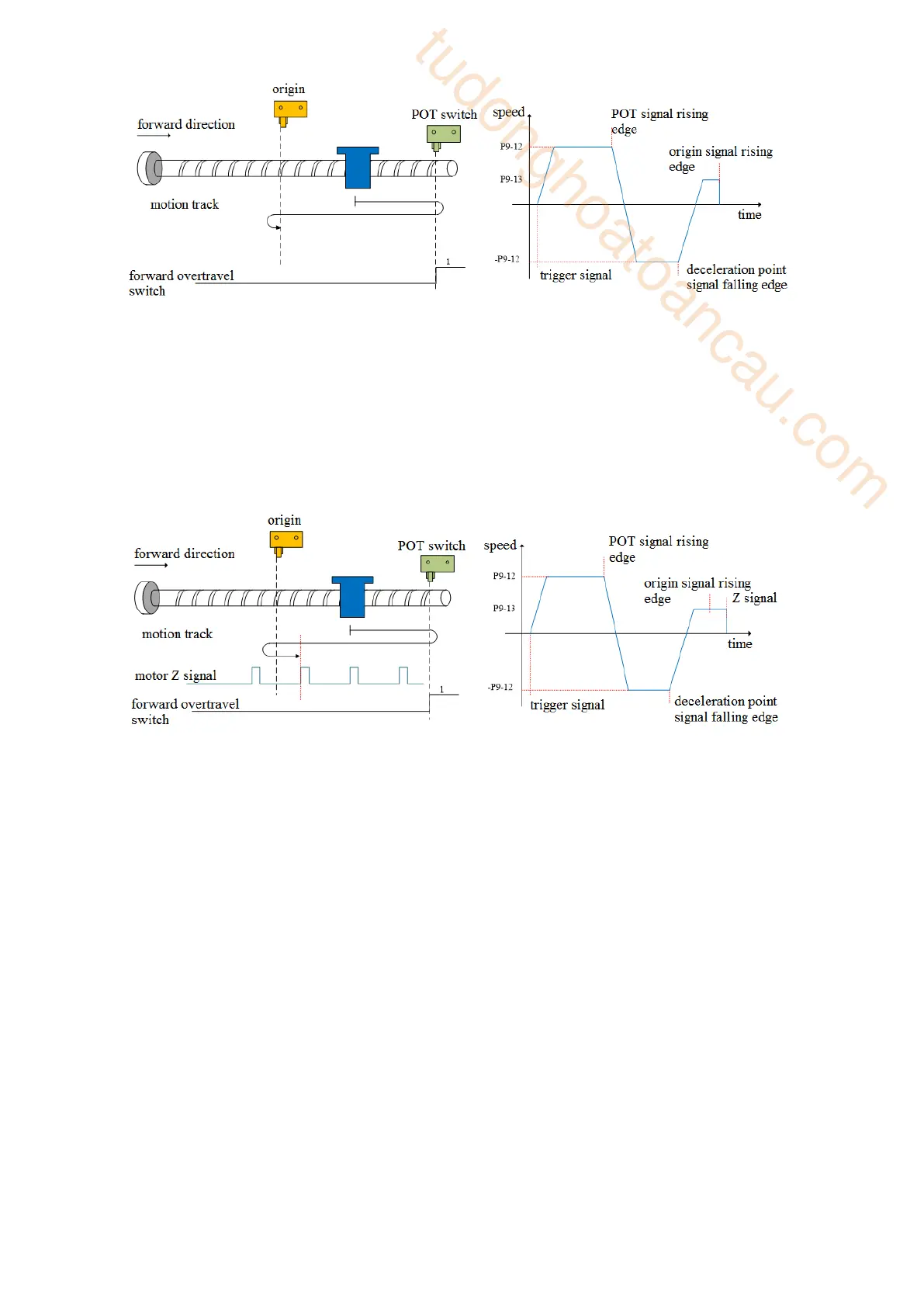
(c3) Z phase number (P9-11.0) is 1 and mechanical offset (P9-19, P9-20) is 0:
In the process of forward acceleration or forward constant speed operation, continue to run after
encountering the rising edge of deceleration point (origin) signal, and then find the first Z-phase signal
and stop immediately.
(c4) Z phase number (P9-11.0) is 1 and mechanical offset (P9-19, P9-20) is not 0:
In the process of positive acceleration or positive constant speed operation, continue to run after
encountering the rising edge of the deceleration point (origin) signal, and then find the first Z-phase
signal to stop immediately. After the motor is completely stopped, the motor will run a quantitative
pulse (P9-19, P9-20) at the set speed P9-12 (homing high speed) according to the set number of
mechanical offset pulses and direction (either positive direction or negative direction), then the motor
stops.
2. Homing mode 1——Reverse return to zero, the deceleration point is the origin switch, and
the origin is the origin switch or motor Z signal(P9-11.2=1)
It needs to connect POT, NOT, origin switch to use this mode.
(a) When the motor starts to move, the signal of origin switch (deceleration point) is invalid, and
the reverse overtravel switch (NOT)(P5-23) is not triggered in the whole process
Firstly, the servo motor searches for the deceleration point signal at high speed -P9-12 (homing high
speed) in reverse until it meets the rising edge of the deceleration point signal. After gradually
accelerating to P9-13 (homing low speed) according to the setting of P9-14 (homing acceleration and
deceleration time), the servo motor forward searches for the falling edge of deceleration point (origin)
signal at the low speed P9-13 (homing low speed). When encountering the falling edge of deceleration
point (origin) signal, it will reverse (resume reverse), and continue to search the rising edge of the
deceleration point (origin) signal at a low speed -P9-13(homing low speed). The next back to origin
action can be divided into four cases:
(a1) Z phase number (P9-11.0) is 0 and mechanical offset (P9-19, P9-20) is 0:
During the operation of continuing to search for the rising edge of deceleration point (origin) signal at
 Loading...
Loading...
