unit equivalent of 0.01mm is more accurate than the unit equivalent of 0.1mm.
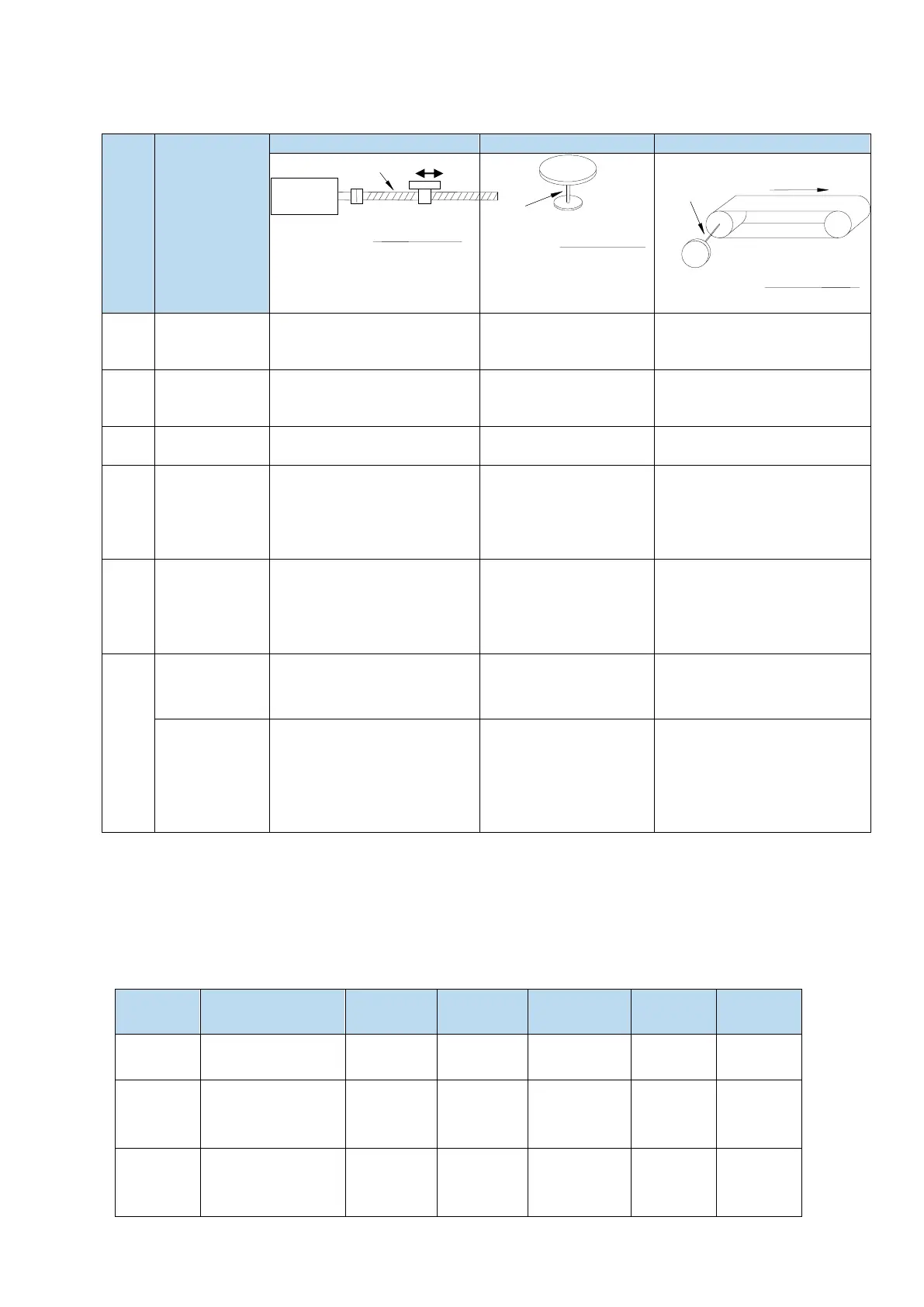
3. Example of setting the electronic gear ratio
Confirm
mechanical
specifications
Machine deceleration ratio:
1:1
1-circle rotate angle:
360°
Confirm the
number of
encoder pulses
Encoder resolution 131072
Encoder resolution
131072
Encoder resolution 131072
Calculate the
command
amount of 1
revolution of
load shaft
Calculate the
pulse number
m of one
revolution of
motor shaft
Set pulses per
rotation
P0-11/P0-12
Set electronic
gear ratio
(P0-13/P0-14)/
(P0-92~95)
After reduction
P0-13=8192
P0-14=375
After reduction
P0-13=8192
P0-14=75
After reduction
P0-13=65536 P0-14=3925
Conver to second gear ratio
P0-92=5536 P0-93=6
P0-94=3925 P0-95=0
5.3.1.2 Positioning completion signal (/COIN, /COIN_HD)
In position control, the signal indicating the completion of servo motor positioning is used when the
command controller needs to complete positioning confirmation.
Related parameters
Positioning
completion width
Positioning
completion
detection mode
Positioning
completion hold
time
 Loading...
Loading...


