V5 series inverter
77
P7.06 Min setting value Range: 0.0~Max setting value 0.0%
P7.07 Feedback value corresponding to min setting Range: 0.0~100.0 (%) 0.0%
P7.08 Max setting value Range: min reference~100.0 (%) 100.0%
P7.09 Feedback value corresponding to max setting Range: 0.0%~100.0 (%) 100.0%
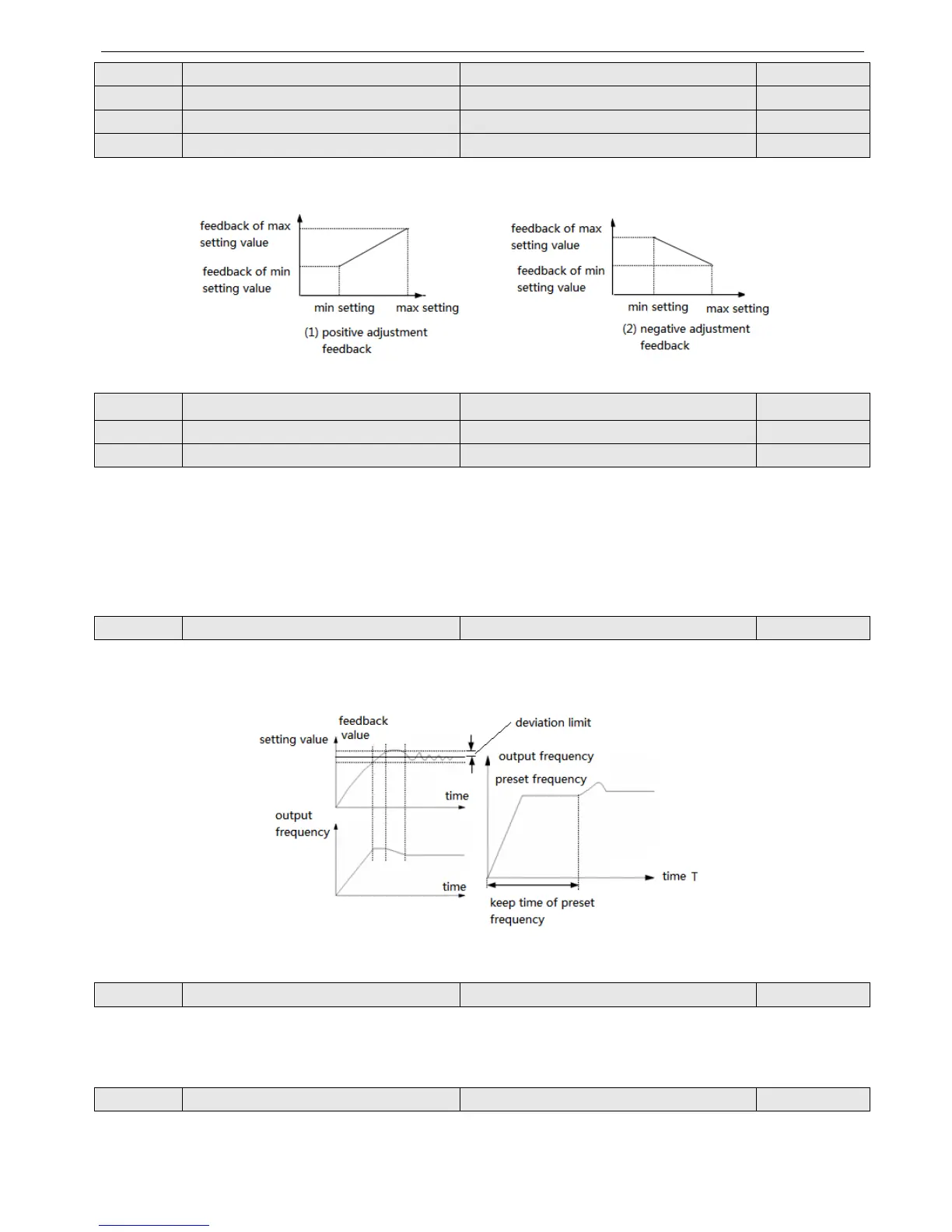
P7.06~P7.09 defines the relationship curve of analog close-loop setting value and expected feedback. See Fig4-36.
Fig. 4-36 setting and feedback curve
P7.10 Proportional gain KP Range: 0.000~9.999 0.050
P7.11 Integral gain KI Range: 0.000~9.999 0.050
P7.12 Sampling cycle T Range: 0.01~10.00s 1.00s
The bigger the proportion gain KP, the quicker the response, but too big may lead to surge easily.
Only adjust with proportiaon gian KP, deviation can not be eliminated, integral gain KI can be used to form PI control to
eliminate the deviation. The bigger the Ki, the quicker the response of changing deviation, but too big of the Ki may lead to
surge easily.
Sampling cycle T is the sampling cycle of feedback value. PI regulator calculates once in every sampling cycle, the longer
the cycle, the slower the response.
P7.13 Limit of deviation Range: 0.0~20.0(%) 2.0(%)
The max deviation value of close-loop setting is shown in Fig.4-37, if the feedback value is in this range, PI regulator will stop adjusting.
This function is useful to improve accuracy and stability of the system.
Fig.4-37 Limit of deviation Fig.4-38 close-loop preset frequency running
P7.14 Close loop adjustment characteristic Range: 0, 1 0
0: Positive. The motor speed increases with the increasing of setting value.
1: Negative. The motor speed decreases with the increasing of setting value.
Note: Define the relationship between setting value and speed.
P7.15 Integral adjustment selection Range: 0, 1 0
0: Stop integral adjustment when the frequency reaches upper limit or lower limit.
1: Continue the integral adjustment when the frequency reaches upper limit or lower limit.
For the system need quick response, it is better to cancel the continue integral adjustment.