Functional description
TCP gauging (BullsEye
®
) 3HDA000057A8519-001 4-7
Assembly instructions
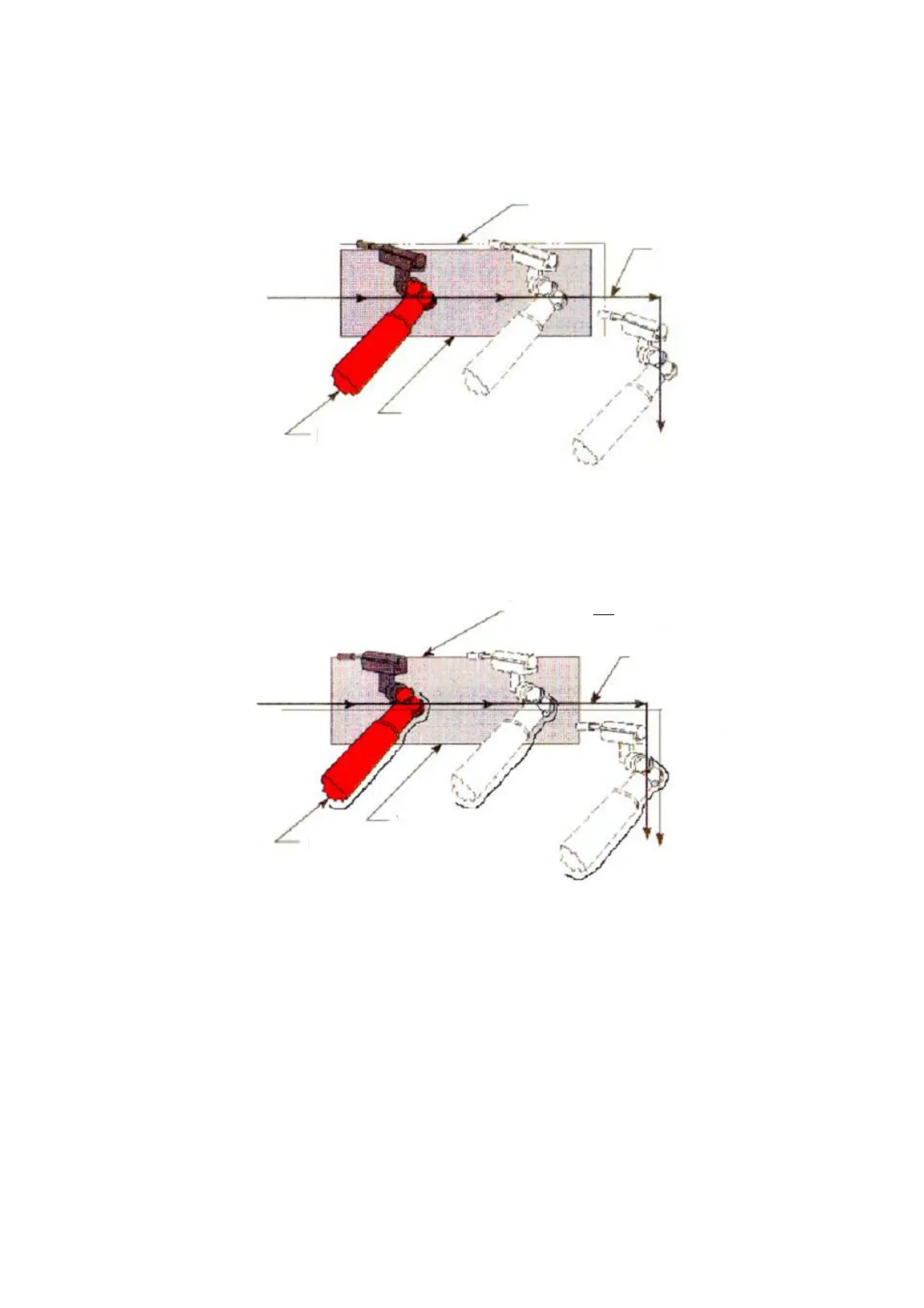
The tool is re-measured by the automatic TCP gauging. The welding gun then runs the correct
trajectory on the component.
The welding gun runs the correct path again (the axial configuration of the robot has changed).
Figure 4-5 Deviation from the programmed trajectory
Figure 4-6 The TCP was corrected
New path of the welding torch
Same path
of th robot
Workpiece
Robot arm
Workpiece
Robot arm
Path of the welding torch
(once again correctly on he trajectory)
Path of the robot
has shifted
 Loading...
Loading...







