52
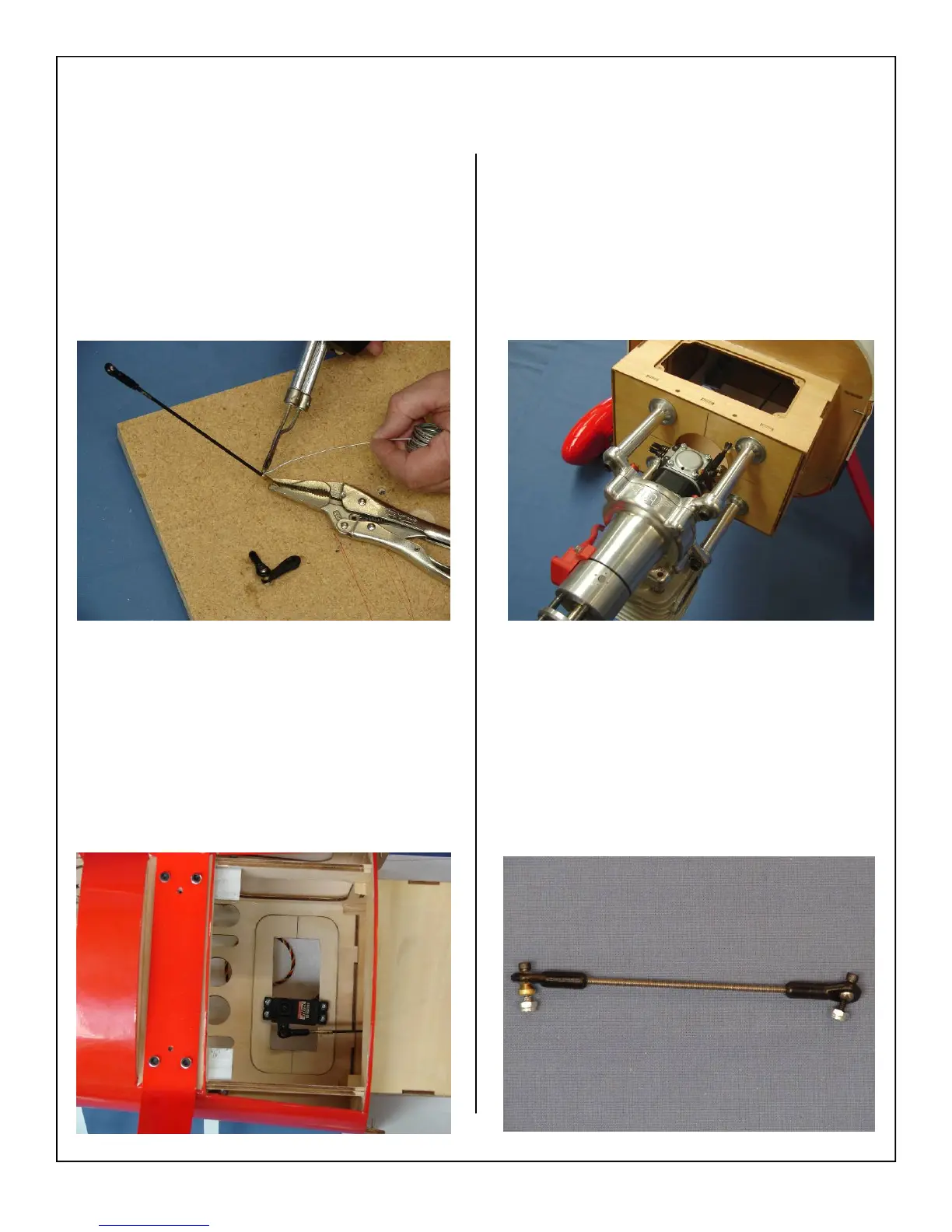
13. Solder the threaded brass coupler to the end of
the throttle pushrod.
14. Attach ball link to throttle servo arm.
15. Attach the throttle pushrod with the 4/40 ball
links and secure. Power up the receiver and
throttle servo and adjust pushrod for proper op-
eration. Ensure the servo or rod does not bind or
jam at closed or full open positions.
16. A none soldering method of attaching throttle
pushrod is shown below.
All thread for this method is Not supplied.
Gather (2) 4-40 ball links, (1) brass spacer,
4-40 all thread.