2-110 Power Loss
If the bus voltage rises above Vrecover for 20mS, the drive determines the
power loss is over. The power loss alarm is cleared.
If the drive is in a “run permit” state, the reconnect algorithm is run to
match the speed of the motor. The drive then accelerates at the programmed
rate to the set speed.
Decel
This mode of operation is useful if the mechanical load is high inertia and
low friction. By recapturing the mechanical energy, converting it to
electrical energy and returning it to the drive, the bus voltage is maintained.
As long as there is mechanical energy, the ride through time is extended and
the motor remains fully fluxed up. If AC input power is restored, the drive
can ramp the motor to the correct speed without the need for reconnecting.
The drive determines a power loss has occurred if the bus voltage drops
below Vtrigger.
If the drive is running, the inertia ride through function is activated.
The load is decelerated at just the correct rate so that the energy absorbed
from the mechanical load balances the losses and bus voltage is regulated to
the value Vinertia.
The Power Loss alarm in [Drive Alarm 1] is set and the power loss timer
starts.
The Alarm bit in [Drive Status 1] is set if the Power Loss bit in [Alarm
Config 1] is set.
The drive faults with a F003 – Power Loss fault if the power loss timer
exceeds [Power Loss Time] and the Power Loss bit in [Fault Config 1] is
set.
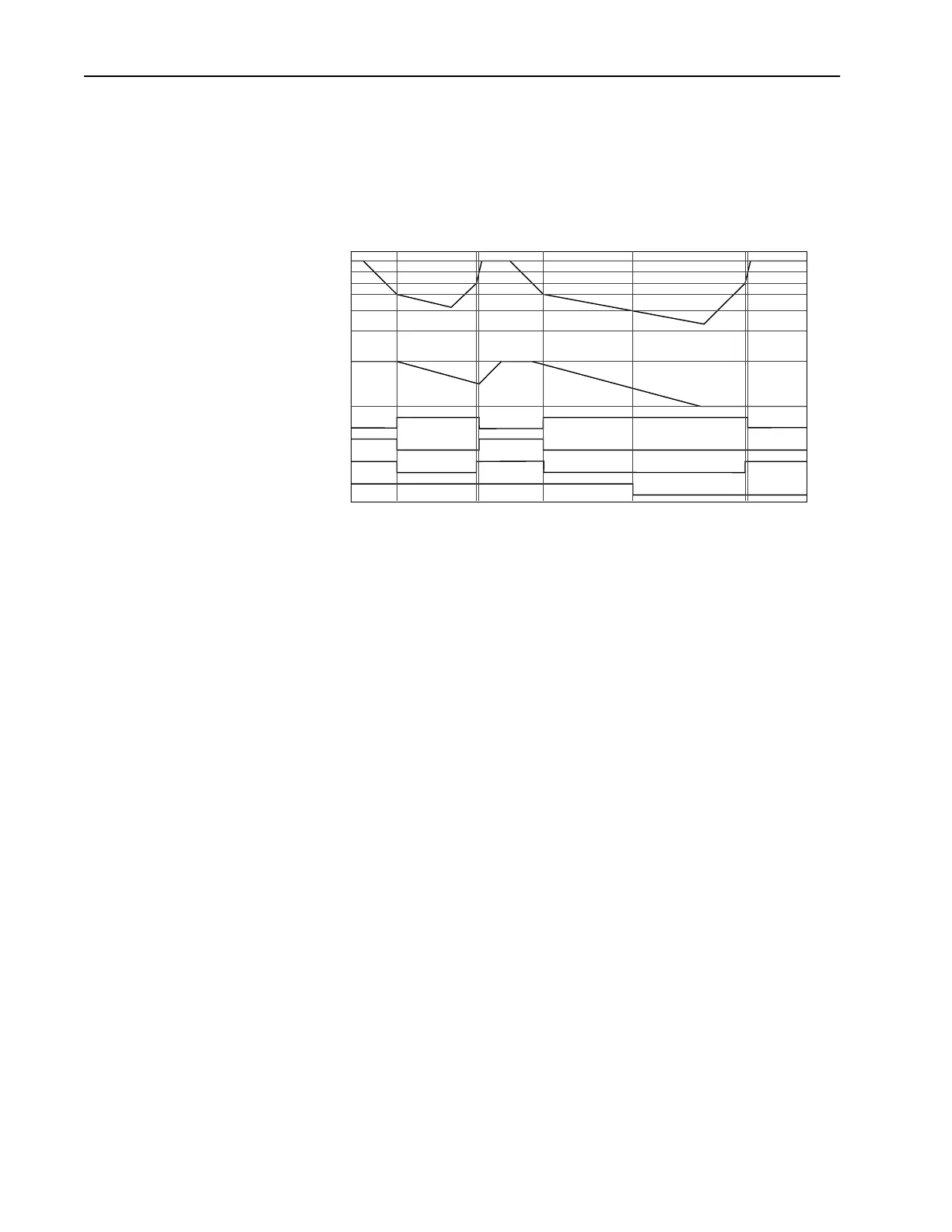
The drive faults with a F004 – UnderVoltage fault if the bus voltage falls
below Vmin and the UnderVoltage bit in [E238 Fault Config 1] is set.
680V
620V
560V
500V
305V
407V
Bus Voltage
Motor Speed
Output Enable
Power Loss
Drive Fault
Pre-Charge

 Loading...
Loading...










