2-14 Analog Inputs
Signal Loss
[Analog In 1, 2 Loss]
Signal loss detection can be enabled for each analog input. The [Analog In
x Loss] parameters control whether signal loss detection is enabled for each
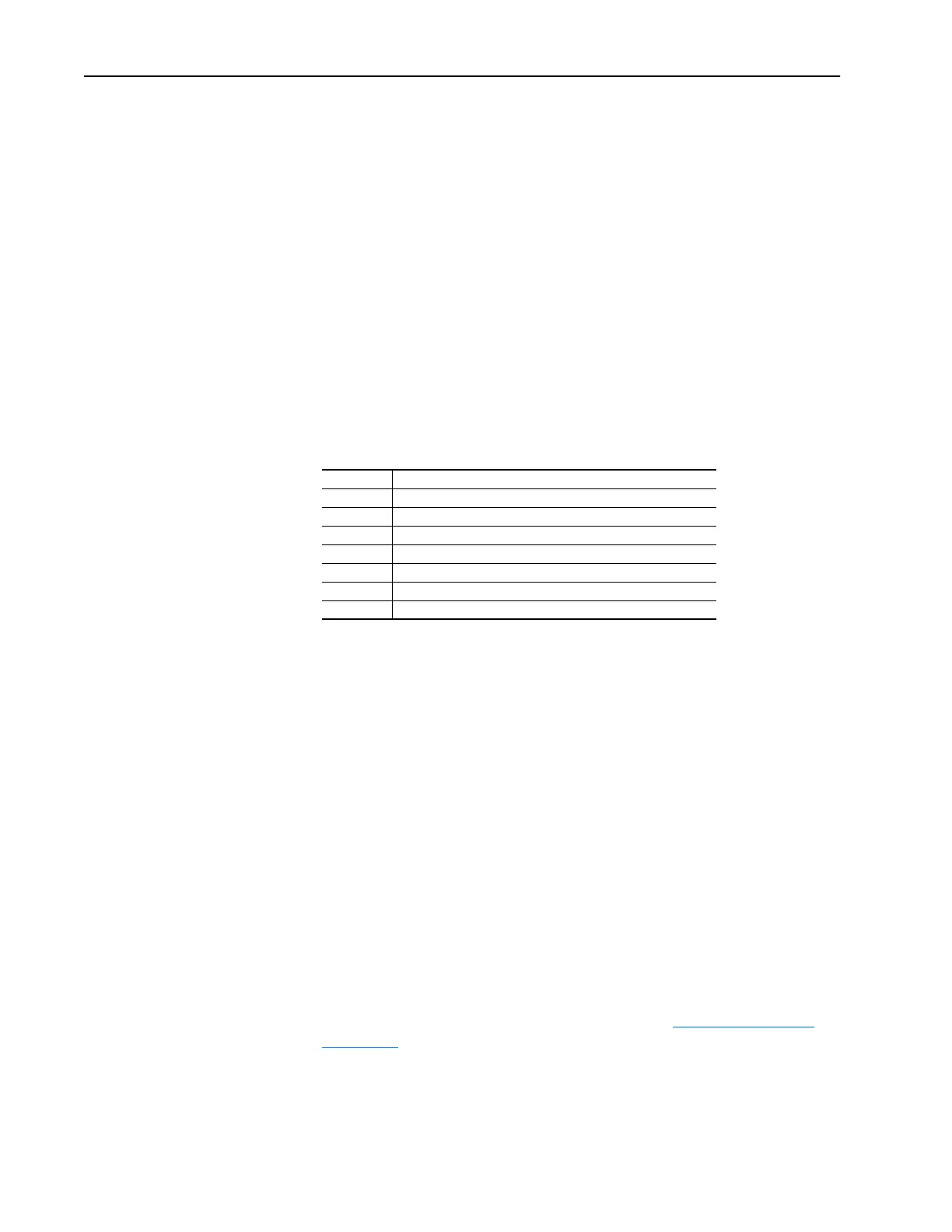
input and defines what action the drive will take when loss of any analog
input signal occurs.
One of the selections for reaction to signal loss is a drive fault, which will
stop the drive. All other choices make it possible for the input signal to
return to a usable level while the drive is still running.
• Hold input
• Set input Lo
• Set input Hi
• Goto Preset 1
• Hold Output Frequency
If the input is in current mode, 4 mA is the normal minimum usable input
value. Any value below 3.2 mA will be interpreted by the drive as a signal
loss, and a value of 3.8 mA will be required on the input in order for the
signal loss condition to end.
If the input is in unipolar voltage mode, 2V is the normal minimum usable
input value. Any value below 1.6 volts will be interpreted by the drive as a
signal loss, and a value of 1.9 volts will be required on the input in order for
the signal loss condition to end.
No signal loss detection is possible while an input is in bipolar voltage
mode. The signal loss condition will never occur even if signal loss
detection is enabled.
Trim
An analog input can be used to trim the active speed reference (Speed
Reference A/B). If analog is chosen as a trim input, two scale parameters
are provide to scale the trim reference. The trim is a +/- value which is
summed with the current speed reference. See also
Speed Reference on
page 2-144.
• [Trim In Select]
• [Trim Out Select]
• [Trim Hi]
• [Trim Lo]
Value Action on Signal Loss
0 Disabled
1 Fault
2 Hold input (continue to use last frequency command.)
3 Set Input Hi - use [Minimum Speed] as frequency command.
4 Set Input Lo - use [Maximum Speed] as frequency command.
5 use [Preset 1] as frequency command.
6 Hold Out Freq (maintain last output frequency)

 Loading...
Loading...










