Motion Group Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 217
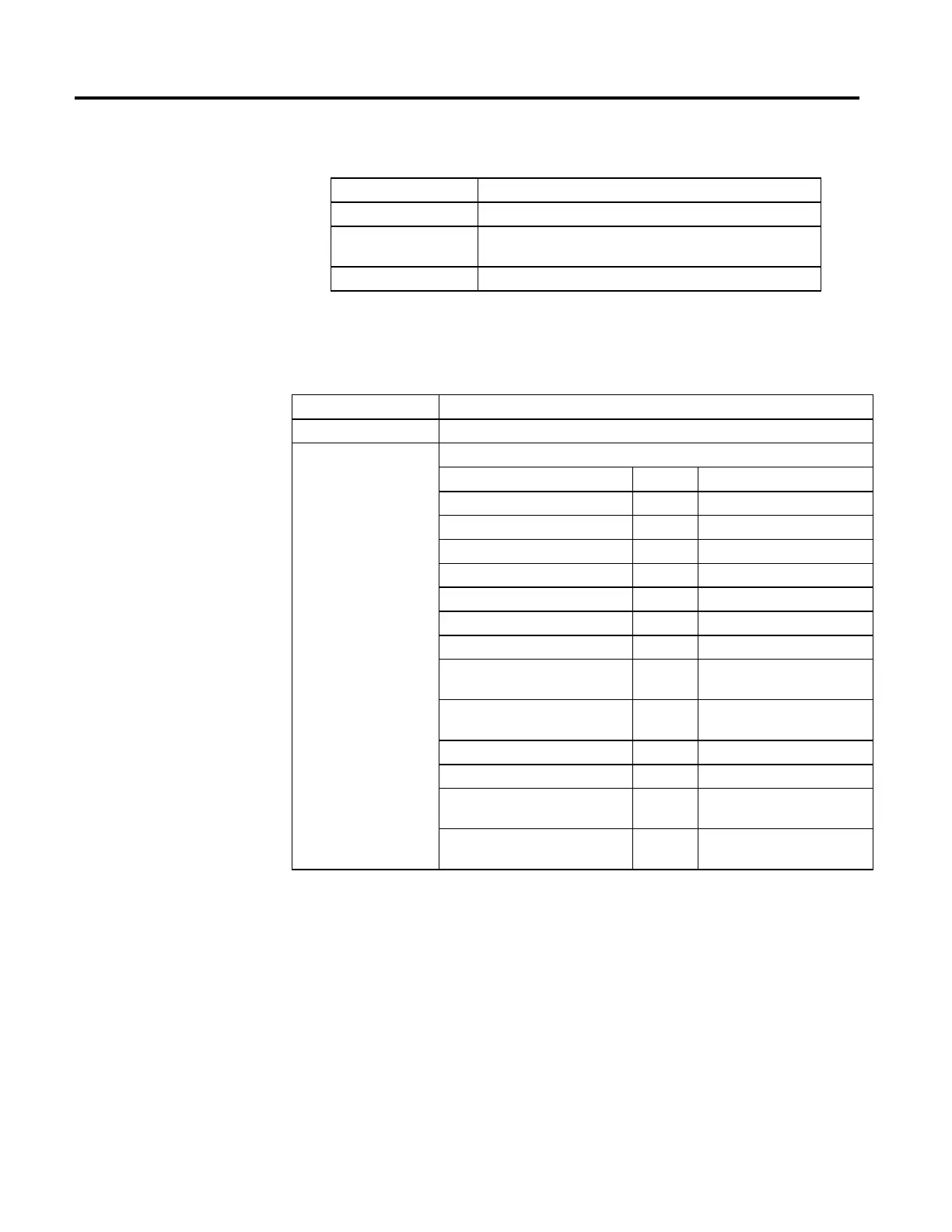
Structured Text
Condition/State Action Taken
Prescan See Prescan in the Ladder Diagram table.
Normal execution See Rung-condition-in is false, followed by rung is true in the Ladder Diagram
table.
Postscan See Postscan in the Ladder Diagram table.
Status Bits
MGS Changes to Single Axis Status Bits
If the Stop Type is Then
NOT All The instruction clears the Motion Status bit for the motion process that you stopped.
All The instruction clears all Motion Status bits.
Bit Name State Meaning
MoveStatus FALSE Axis is not Moving.
JogStatus FALSE Axis is not Jogging.
GearingStatus FALSE Axis is not Gearing.
HomingStatus FALSE Axis is not Homing.
StoppingStatus TRUE Axis is not Stopping.
PositionCamStatus FALSE Axis is not Position Camming.
TimeCamStatus FALSE Axis is not Time Camming.
PositionCamPendingStatus FALSE Axis does not have a Position Cam
Pending.
TimeCamPendingStatus FALSE Axis does not have a Time Cam
Pending.
GearingLockStatus FALSE Axis is not in a Gear Locked condition.
PositionCamLockStatus FALSE Axis is not in a Cam Locked condition.
DirectVelocityControlStatus FALSE Axis is not under Direct Velocity
Control.
DirectTorqueControlStatus FALSE Axis is not under Direct Torque
Control.
Example
When the input conditions are true, the controller stops motion on all axes in
group1. After the controller stops all motion, the axes are inhibited.
 Loading...
Loading...







