Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 509
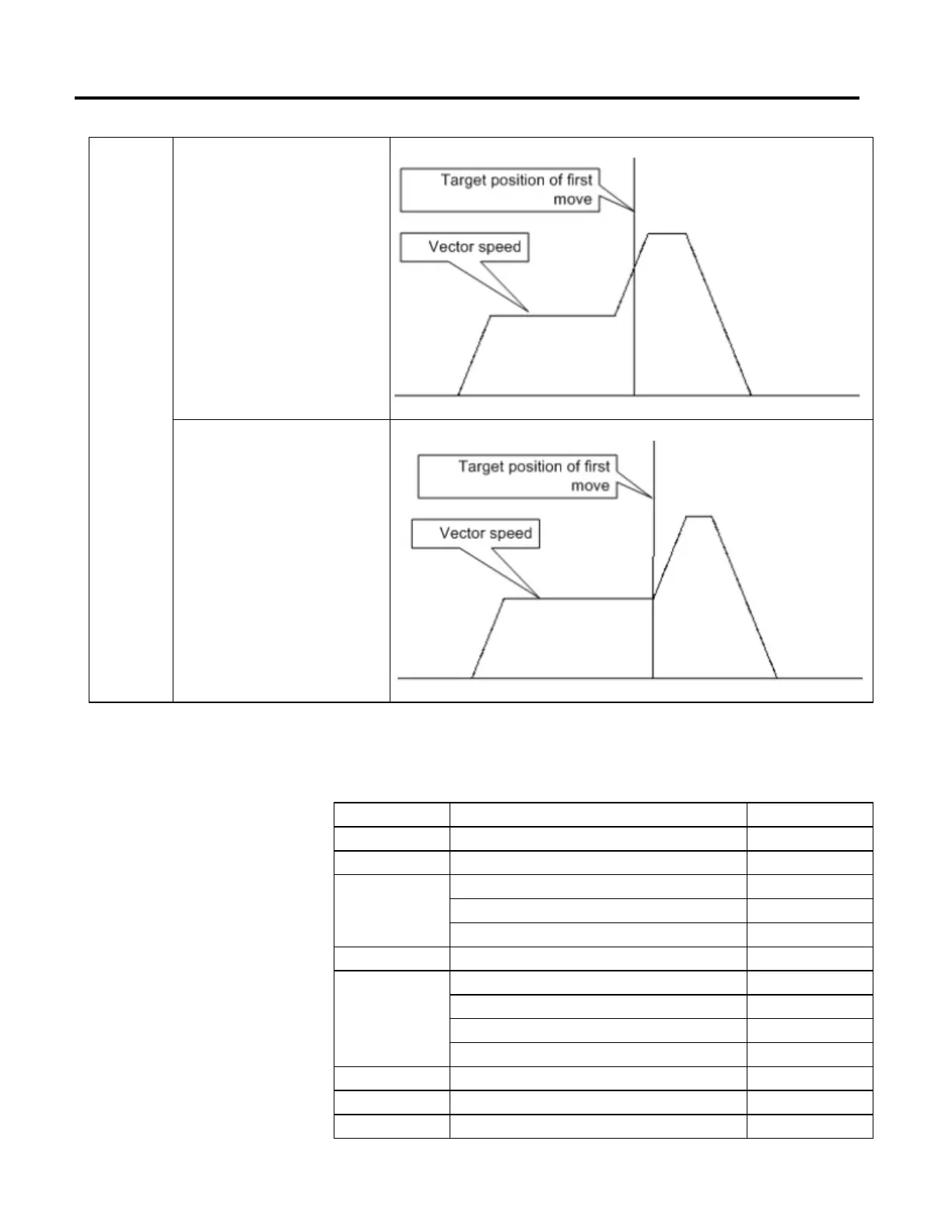
Faster 2 - Command Tolerance
3 - No Decel
6 - Command Tolerance Programmed
4 - Contour Velocity Constrained
5 - Contour Velocity Unconstrained
All commands in the following table are for the Slave Coordinate System.
Instruction Parameters MDCC IP Bit
MGS
Reset
MGSD
Reset
MCS
Stop Type = Coordinated Motion Not Changed
Stop Type = Transform Not Changed
Stop Type = All Reset
MCSD
Reset
MAS
Stop Type = Jog Not Changed
Stop Type = Move Not Changed
Stop Type = Time CAM Not Changed
Stop Type = All Reset
MASD
Reset
MSF
Not Changed
MDF
Not Changed
Slave Coordinate System
and Master Axis
 Loading...
Loading...







