Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 367
See also
Motion Error Codes (.ERR) on page 557
Multi-Axis Coordinated Motion Instructions on page 345
Common Attributes on page 663
Structured Text Syntax on page 635
This information applies to the Compact GuardLogix 5380, CompactLogix 5380,
CompactLogix 5480, ControlLogix 5580, and GuardLogix 5580 controllers.
Use the MCTO instruction to establish a bidirectional transform that is set up
between a Cartesian and a robot systems with coordinates that are joint axes of a
robot. The XYZ translation coordinates and the RxRyRz orientation coordinates
in the fixed angle convention define the Cartesian coordinates. The geometrical
configurations of the robots typically have joint axes that are not orthogonal. The
coordinate system type, such as Delta, specifies the geometrical configurations.
Available Languages
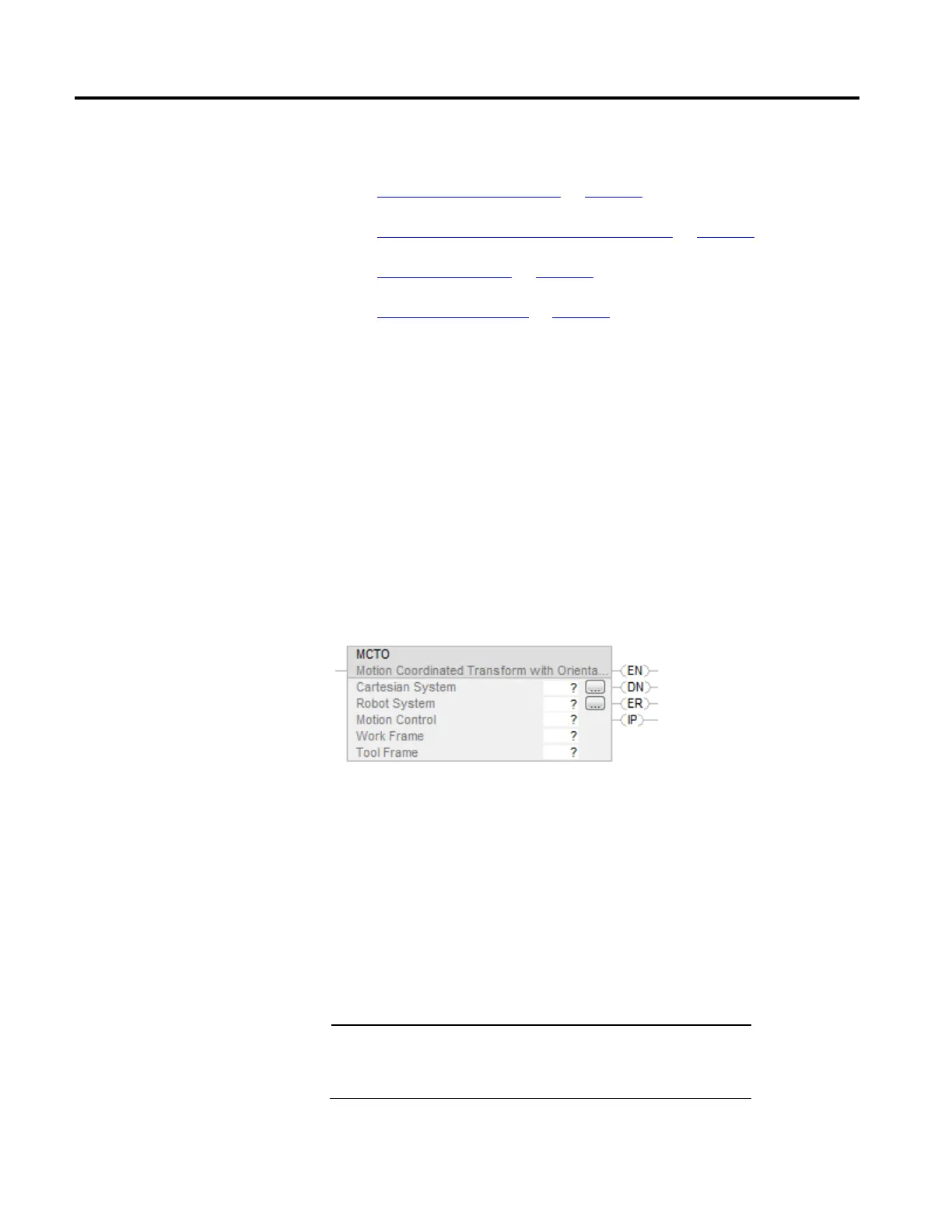
Ladder Diagram
Function Block
This instruction is not available in function block.
Structured Text
MCTO(CartesianSystem, RobotSystem, MotionControl, WorkFrame,
ToolFrame);
Operands
Important:
Do not use the same tag name for more than one instruction in the same
program. Do not write to any instruction output tag under any
circumstances.
Motion Coordinated Transform
with Orientation (MCTO)
 Loading...
Loading...







