Motion Configuration Instructions
338 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
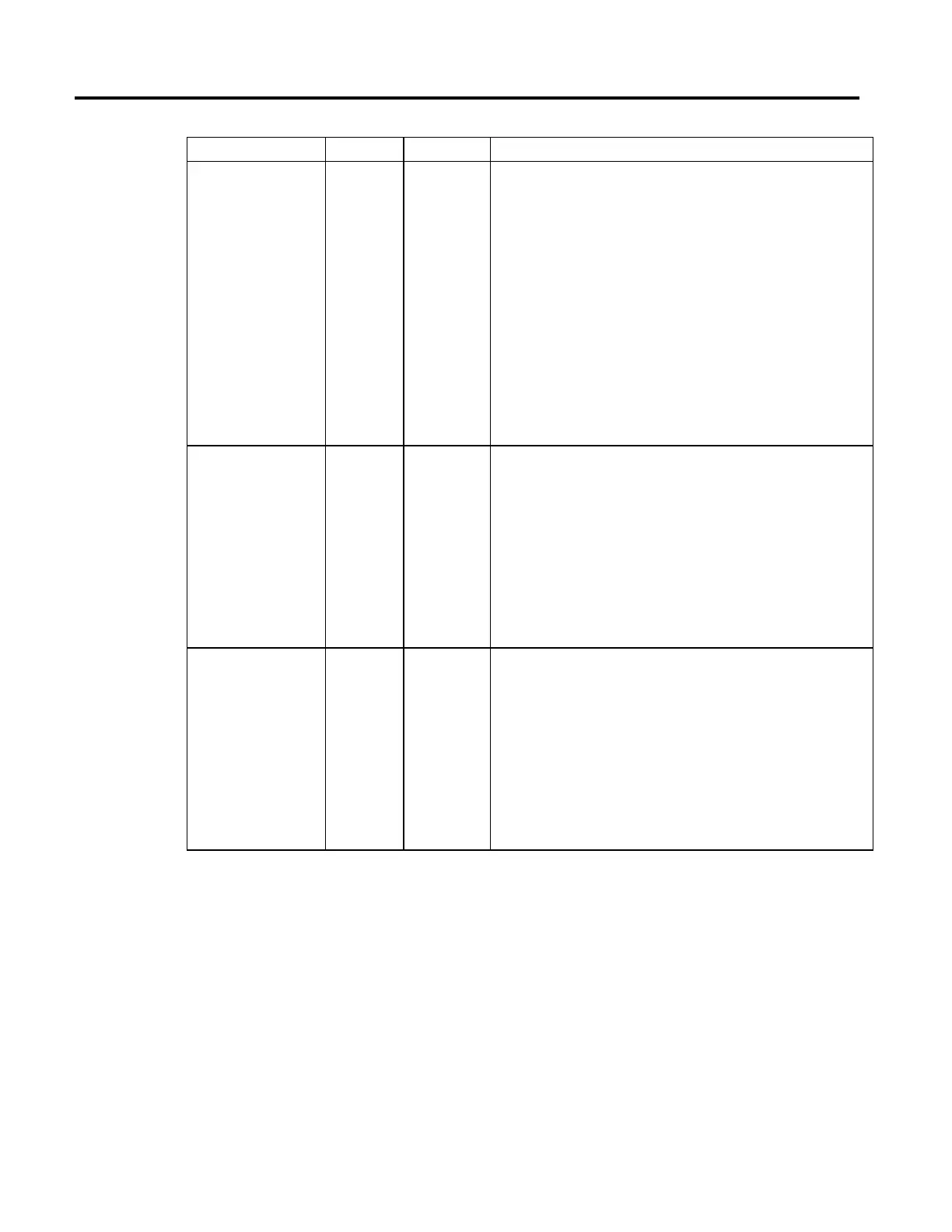
Axis Parameter Data Type Units Meaning
Hookup Test Status USINT - Returns the status of the last Run Hookup Test service on the targeted drive axis. The
Hookup Test Status attribute can be used to determine when the hookup test service
has successfully completed.
Conditions may occur, however, that make it impossible for the drive to properly
perform the operation. When this is the case, the test process is automatically
terminated and a test error is reported that is stored in the Hookup Test Status output
parameter.
0 = test process successful
1 = test in progress
2 = test process aborted
3 = test process timed-out
4 = test process faulted
5 = test failed - no feedback 1 counts
6 = test failed - no feedback 2 counts
7-255 = reserved
Hookup Test Feedback
Direction 1
USINT - Reports the direction of axis travel during the last hookup test, as detected by the
drive's feedback 1 device.
0 = The drive’s feedback 1 device detected a positive direction, that is, increasing
counts.
1 = The drive’s feedback 1 device detected a negative direction, that is, decreasing
counts.
2-255 = reserved
The value for Hookup Test Feedback 1 Direction, as determined by the hookup test,
does not depend on the current feedback, motor, or motion polarity attribute
configuration. This value, combined with the user’s definition of forward direction, can
be used to configure the various polarity attributes for the correct directional sense.
Hookup Test Feedback
Direction 2
USINT - Reports the direction of axis travel during the last hookup test, as detected by the
drive's feedback 2 device.
0 = The drive’s feedback 2 device detected a positive direction, that is, increasing
counts.
1 = The drive’s feedback 2 device detected a negative direction, that is, decreasing
counts.
2-255 = reserved
The value for Hookup Test Feedback 2 Direction, as determined by the hookup test,
does not depend on the current feedback, motor, or motion polarity attribute
configuration. This value, combined with the user’s definition of forward direction, can
be used to configure the various polarity attributes for the correct directional sense.
If due to improper hookup, or some other problem with the system, the axis
feedback fails to detect that axis reaching the configured Motor Encoder Test
Increment after moving the axis at least that distance, then abort the test using the
MAS instruction and check the encoder wiring.
 Loading...
Loading...







