Multi-Axis Coordinated Motion Instructions
408 Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018
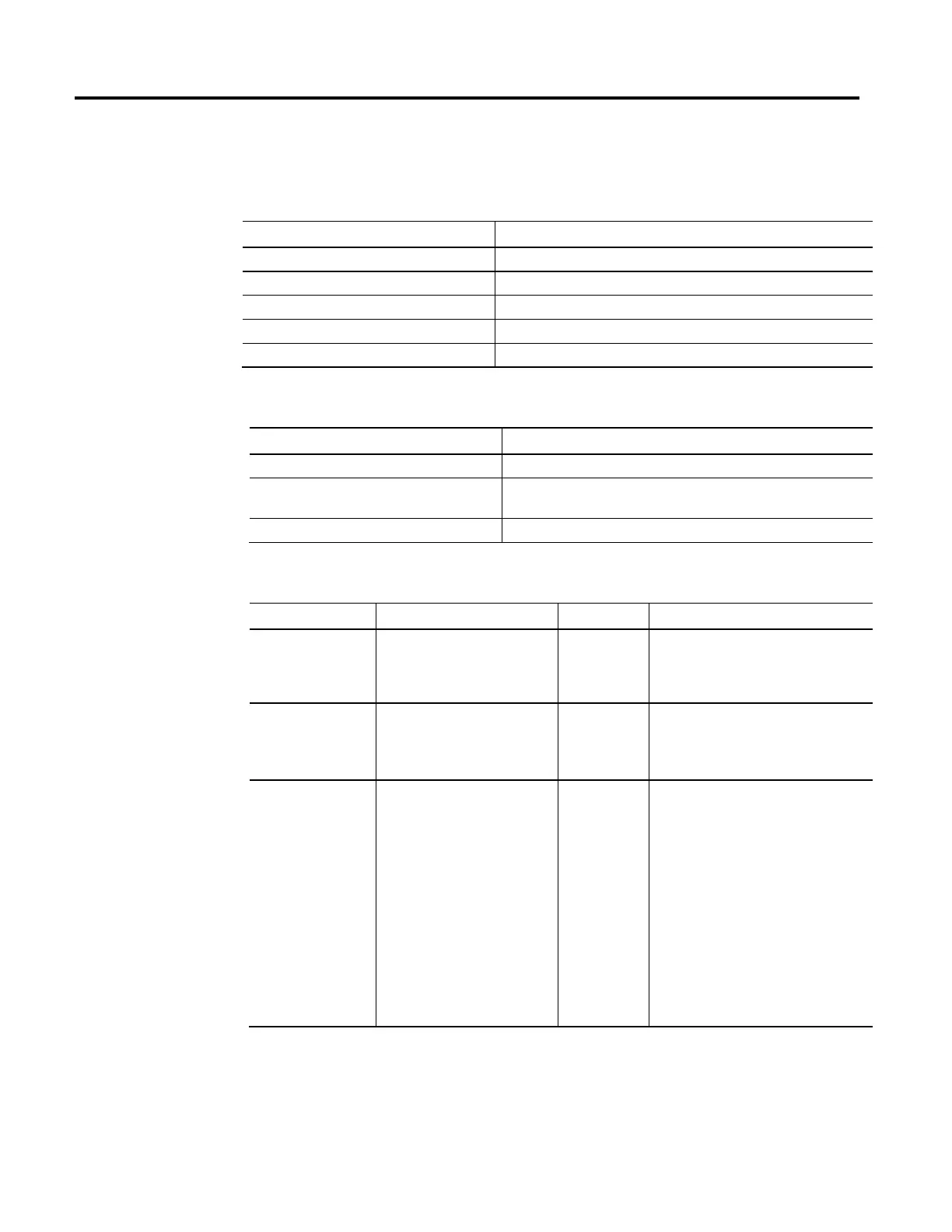
Execution
Ladder Diagram
Condition/State Action Taken
Prescan Same as Rung-condition-in is false.
Rung-condition-in is false The .EN, .DN, .ER are cleared to false.
Rung-condition-in is true and .EN bit is false The .EN bit is set to true and the instruction executes.
Rung-condition-in is true and .EN bit is true N/A
Postscan Same as Rung-condition-in is false.
Structured Text
Condition/State Action Taken
Prescan See Prescan in the Ladder Diagram table.
Normal execution See Rung-condition-in is false, followed by Rung-condition-in is true in the Ladder
Diagram table.
Postscan See Postscan in the Ladder Diagram table.
Inputs
Operand Data Type Format Description
Transform Direction DINT Tag To calculate Cartesian position, select Forward(0).
To calculate Robot joint positions, select
Inverse(1).
Reference Position REAL[6] Tag If the transform direction is forward, enter an
array that has joint angles.
If the transform direction is inverse, enter an array
that has Cartesian positions.
Robot Configuration DINT Tag If TD is Inverse, create a tag to represent the
specified robot Configuration. If the TD is forward,
the system returns the robot Configuration
defined in the same format.
Bit 0 of robot configuration will be a don’t care,
for both TD=Inverse and TD=Forward.
List of bit values:
Bit0 – Robot Configuration Change(1)/Same(0)
Bit1 – Lefty(1)/Righty(0)
Bit2 – Above(1)/Below(0)
Bit3 – Flip(1/No flip(0)
Robot Configuration must be zero (0) for Delta
robot geometries.
 Loading...
Loading...







