Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 487
Extended Error Codes
See Motion Error Codes (ERR) for Motion Instructions. Use Extended Error
Codes (EXERR) for more instruction about an error.
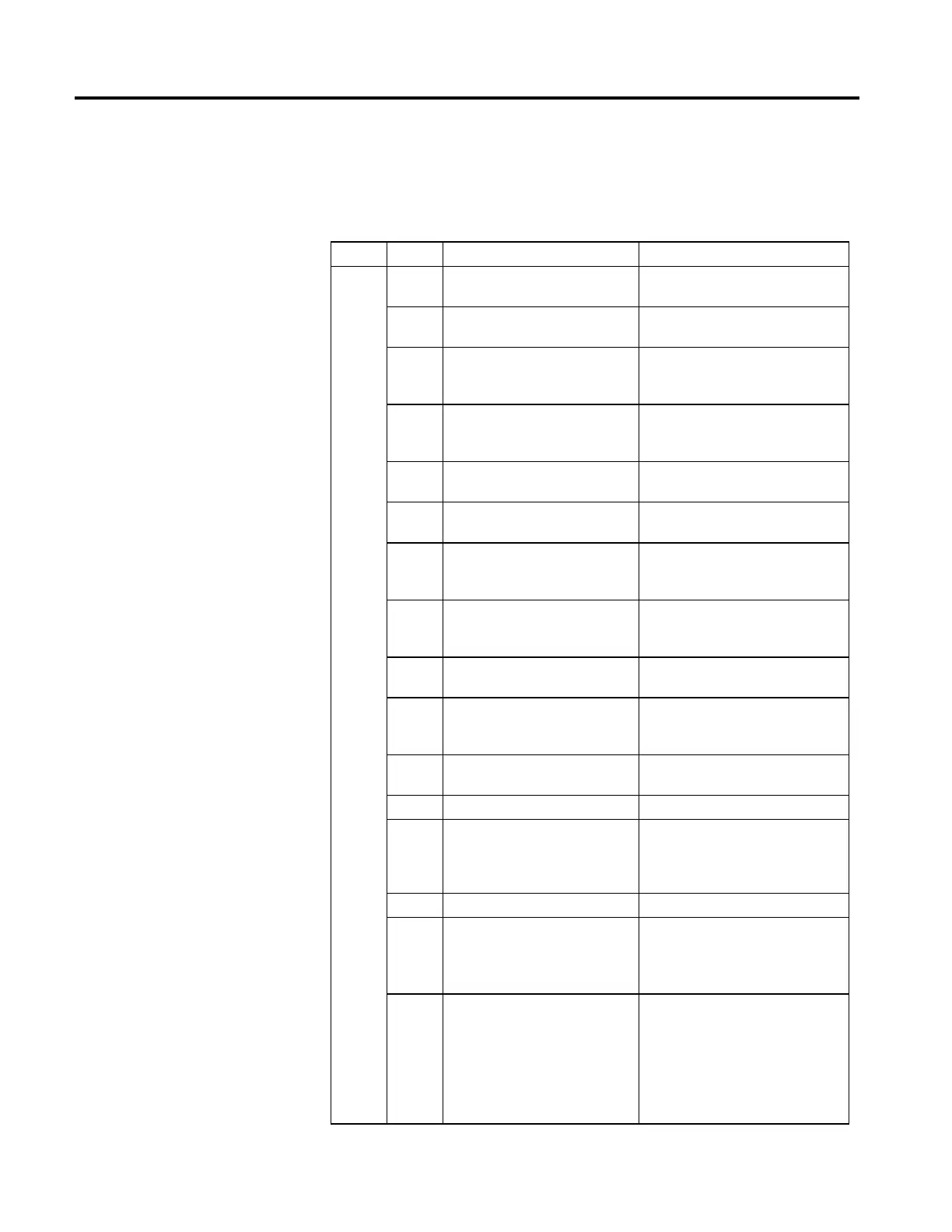
ERR EXERR Corrective Action Notes
61 1 Assign both coordinate systems to the
motion group.
2 Check that you are using the correct source
and target systems.
You cannot use the same coordinate system as
source and target.
3 Set the transform dimension of the source
system to the number of axes in the
system, up to three.
4 Set the transform dimension of the target
system to the number of axes in the system
to be transformed, up to three.
5 Use a different source system. You can only use one coordinate system as the
source for one active transform.
6 Use a different target system. You can only use one coordinate system as the
target for one active transform.
7 Look for source or target axes that you are
already using in another transform. Use
different axes in the coordinate system.
You can only use an axis in one source system
and one target system.
8 Use a target system that isn't’t the source
for this chain of transforms.
You cannot create a circular chain of
transforms that leads back to the original
source.
9 Check that you have assigned the correct
axes to each coordinate system.
You cannot use the same axes in the source
and target systems.
10 Stop all motion processes for all the axes in
both systems (for example, jog, move, and
gear).
You cannot start the transform if any motion
process is controlling a source or target axis.
11 Insufficient resources available to initiate
the transform connection.
12 Set the link lengths. You cannot use a link length of zero.
13 Look for source or target axes that are in
the shutdown state. Use a Motion Axis
Shutdown Reset (MASR) instruction or
direct command to reset the axes.
14 Uninhibit all the source or target axes.
15 Check the configured values for the base
offsets and end effector offsets for the
Delta or SCARA Delta robot.
(X1b-X1e) cannot be less than 0.0 for both the
Delta and SCARA Delta robots.
For Delta robots, this error can also occur if the
value of L1 + (X1b-X1e) is greater than L2.
16 Check the SCARA independent and SCARA
Delta robot configurations to be sure that:
The transform dimension for the source
coordinate system is configured as 2.
The configured third axes for the source
coordinate system and the target
coordinate system are the same.
 Loading...
Loading...







