Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 543
• Speed, Acceleration, Deceleration, and Jerk must always be programmed in
the same mode or you get an error.
• If Speed units are Seconds, then Acceleration, Deceleration, and Jerk units
must be seconds too.
• If Speed units are Master units, then Acceleration, Deceleration, and Jerk
units must be Master units too.
• All unsupported unit combinations result in an err at runtime when the
instruction is executed.
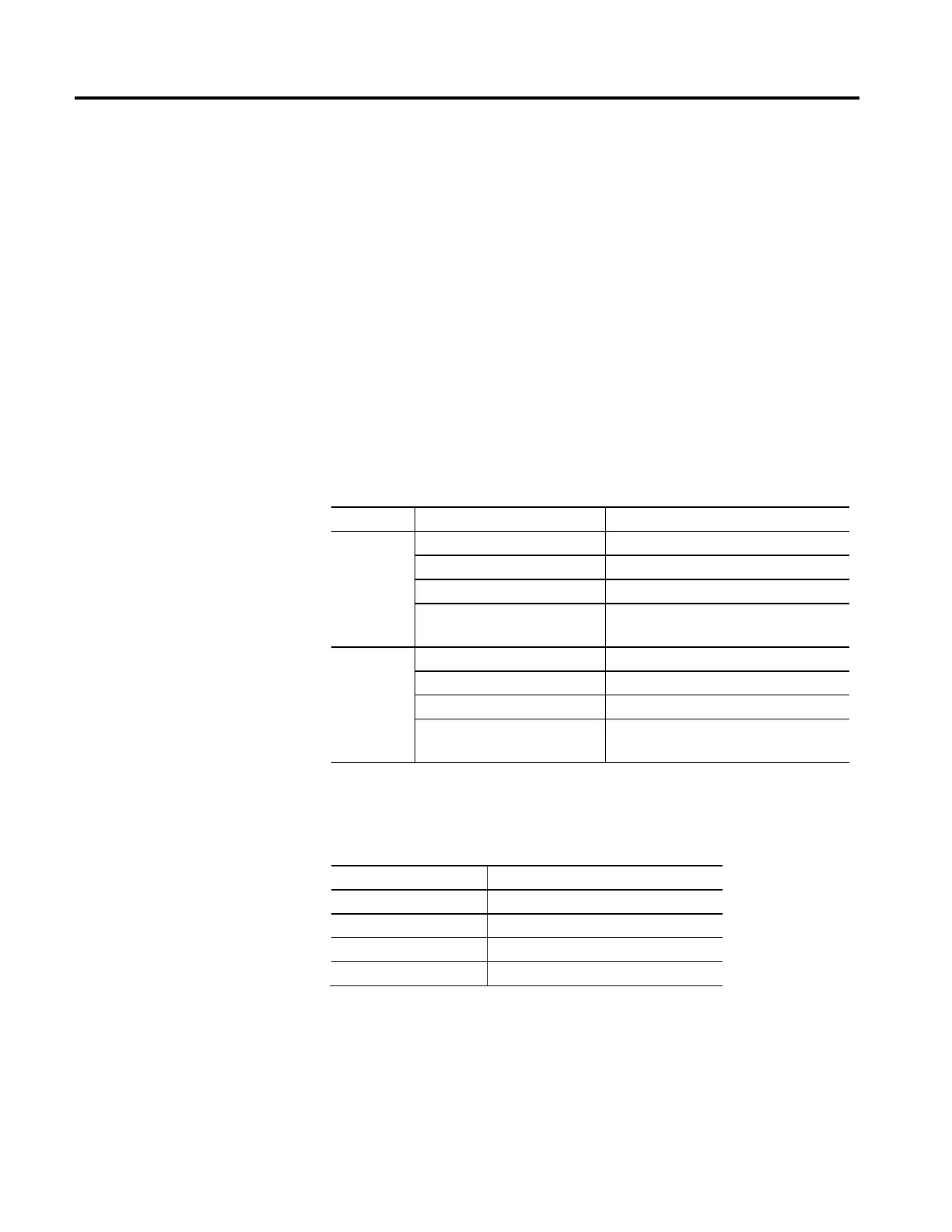
Jerk Enumerations
The following enumerations are defined for time driven and MDSC driven Jerk
Units.
Time Driven and MDSC Driven Jerk Units Descriptions
Mode Compatibility Enumerations
Time Existing Enumeration 0 = Units per sec3
Existing Enumeration 1 =% Maximum
Existing Enumeration 2 = % of Time
New Enumeration 3 = Seconds
Time based programming
MDSC New Enumeration 4 = Units per MasterUnit2
5 = Reser ved
New Enumeration 6 = % of Time-master Driven
New Enumeration 7 = Master Units
Analogous to seconds in time based programming
Acceptable combinations of Accel and Decel Units are based on the programmed
Speed Units in the instruction as is shown in the table below. This table is used to
clarify the differences in the following four tables.
Speed Units Accel Units versus Jerk Units
Units per Sec Table 145
Units per Master Units Table 146
Seconds Table 147
Master Units Table 148
The following table shows acceptable combinations of Acceleration Units and
Jerk Units when Speed Units are Units per Second.
 Loading...
Loading...







